1、lunch
Z:Precision_LandingRV1106_RV1103_LINUX_IPCprojectcfgBoardConfig_IPCBoardConfig-SPI_NOR-NONE-RV1106_IPC38_DEMO_V10-IPC.mk
/home/wzh/work/Precision_Landing/RV1106_RV1103_LINUX_IPC/project/cfg/BoardConfig_IPC/BoardConfig-SPI_NOR-NONE-RV1106_IPC38_DEMO_V10-IPC.mk
2、telnet
root solokey
3、USB无法烧录
换根短的线就ok了
4、sensor驱动
在sysdrv/source/kernel/drivers/media/i2c/mis20s11.c
5、DPHY与CPHY

6、media-ctl和v4l2-ctl工具在RV1105平台怎么编译出来调试使用?
直接解压media/libv4l/下的v4l-utils-1.16.5-arm-rockchip830-linux-uclibcgnueabihf.tar.bz2然后拷贝到对应目录
cp -f /home/wzh/work/Precision_Landing/RV1106_RV1103_LINUX_IPC/media/libv4l/v4l-utils-1.16.5-arm-rockchip830-linux-uclibcgnueabihf/root/usr/bin/* ../../../../output/out/oem/usr/bin/
cp -rf /home/wzh/work/Precision_Landing/RV1106_RV1103_LINUX_IPC/media/libv4l/v4l-utils-1.16.5-arm-rockchip830-linux-uclibcgnueabihf/root/usr/lib/* ../../../../output/out/oem/usr/lib/
7、使用nc命令在机器和Windows之间传输文件
机器端: nc 192.168.144.234 8210 < /tmp/isp_yuv32.nv12 windows端:nc -l -p 8210 > isp_yuv32.nv12
8、media-ctl -p -d /dev/media0
# media-ctl -p -d /dev/media0
Media controller API version 5.10.160
Media device information
------------------------
driver rkcif
model rkcif-mipi-lvds
serial
bus info
hw revision 0x0
driver version 5.10.160
Device topology
- entity 1: stream_cif_mipi_id0 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video0
pad0: Sink
<- "rockchip-mipi-csi2":1 [ENABLED]
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 5: stream_cif_mipi_id1 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video1
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 [ENABLED]
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 9: stream_cif_mipi_id2 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video2
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 [ENABLED]
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 13: stream_cif_mipi_id3 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video3
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 [ENABLED]
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 17: rkcif_scale_ch0 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video4
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 [ENABLED]
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 21: rkcif_scale_ch1 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video5
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 [ENABLED]
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 25: rkcif_scale_ch2 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video6
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 [ENABLED]
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 29: rkcif_scale_ch3 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video7
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 [ENABLED]
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 33: rkcif_tools_id0 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video8
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 [ENABLED]
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 []
- entity 37: rkcif_tools_id1 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video9
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 [ENABLED]
<- "rockchip-mipi-csi2":11 []
- entity 41: rkcif_tools_id2 (1 pad, 11 links)
type Node subtype V4L flags 0
device node name /dev/video10
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
<- "rockchip-mipi-csi2":9 []
<- "rockchip-mipi-csi2":10 []
<- "rockchip-mipi-csi2":11 [ENABLED]
- entity 45: rockchip-mipi-csi2 (12 pads, 122 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SGRBG12_1X12/1920x1080 field:none
crop.bounds:(0,0)/1920x1080
crop:(0,0)/1920x1080]
<- "rockchip-csi2-dphy1":1 [ENABLED]
pad1: Source
-> "stream_cif_mipi_id0":0 [ENABLED]
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad2: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 [ENABLED]
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad3: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 [ENABLED]
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad4: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 [ENABLED]
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad5: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 [ENABLED]
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad6: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 [ENABLED]
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad7: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 [ENABLED]
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad8: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 [ENABLED]
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad9: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 [ENABLED]
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 []
pad10: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 [ENABLED]
-> "rkcif_tools_id2":0 []
pad11: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
-> "rkcif_tools_id0":0 []
-> "rkcif_tools_id1":0 []
-> "rkcif_tools_id2":0 [ENABLED]
- entity 58: rockchip-csi2-dphy1 (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev1
pad0: Sink
[fmt:SGRBG12_1X12/1920x1080@10000/300000 field:none]
<- "m00_b_mis20s10 4-0030":0 [ENABLED]
pad1: Source
-> "rockchip-mipi-csi2":0 [ENABLED]
- entity 63: m00_b_mis20s10 4-0030 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev2
pad0: Source
[fmt:SGRBG12_1X12/1920x1080@10000/300000 field:none]
-> "rockchip-csi2-dphy1":0 [ENABLED]
# 9、原理图
sensor0用i2c4:
/omit-if-no-ref/
i2c4m2_xfer: i2c4m2-xfer {
rockchip,pins =
/* i2c4_scl_m2 */
<3 RK_PC7 3 &pcfg_pull_none_smt>,
/* i2c4_sda_m2 */
<3 RK_PD0 3 &pcfg_pull_none_smt>;
};
sensor1用i2c1:
/omit-if-no-ref/
i2c1m1_xfer: i2c1m1-xfer {
rockchip,pins =
/* i2c1_scl_m1 */
<2 RK_PB0 2 &pcfg_pull_none_smt>,
/* i2c1_sda_m1 */
<2 RK_PB1 2 &pcfg_pull_none_smt>;
};10、使用i2cdetect查看sensor是否在线
# i2cdetect -y 4
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: UU -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
#
#
# i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: UU -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
# sensor2做主机可以检测到
11、开机启动脚本
Z:Precision_LandingRV1106_RV1103_LINUX_IPCprojectapp
kipc
kipcsrc
v1106_ipcRkLunch.sh
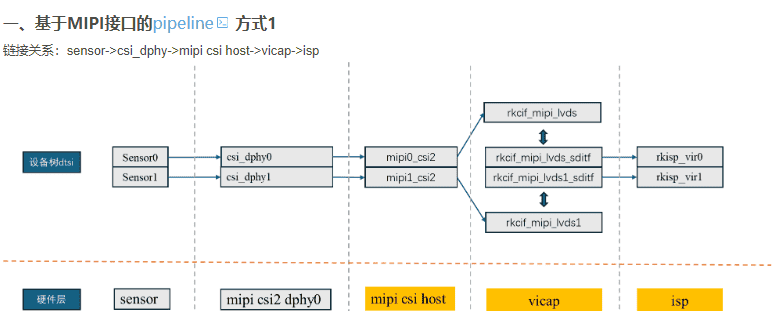
12、拓补结构
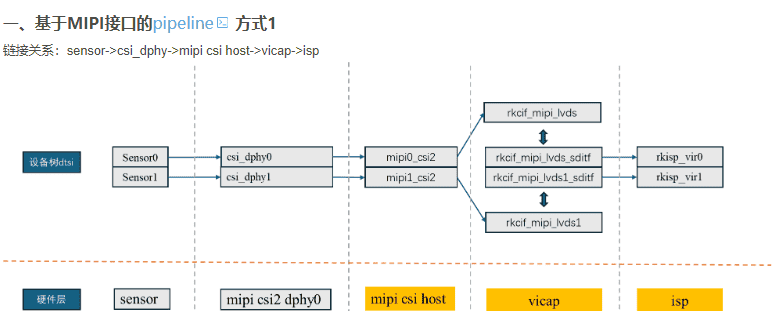
MIPI-csi调试_mipidcphy0-CSDN博客

13、v4l2-ctl命令
抓YUV需要先跑rkaiq_3A_server & (跑命令前需要有对应的josn文件,没有对应的文件可以看后面章节怎么修
改一个出来)
然后 v4l2-ctl -d /dev/video22 –set-fmt-video=width=2688,height=1520,pixelformat=NV12 –stream
mmap=3 –stream-skip=30 –stream-to=/mnt/output.yuv –stream-count=1 –stream-poll
这样可以拿isp处理好效果的yuv文件。
可以用7yuv yuview等软件看图
# v4l2-ctl -d /dev/video11 --list-formats
[ 193.506346] stream_cif_mipi_id0: open video, entity use_countt 1
ioctl: VIDIOC_ENUM_FMT
[ 193.510661] stream_cif_mipi_id0: close video, entity use_count 0
Type: Video Capture Multiplanar
[0]: 'RG12' (12-bit Bayer RGRG/GBGB)
[1]: 'BA12' (12-bit Bayer GRGR/BGBG)
[2]: 'GB12' (12-bit Bayer GBGB/RGRG)
[3]: 'BG12' (12-bit Bayer BGBG/GRGR)
[4]: 'Y12 ' (12-bit Greyscale)
# # 抓取 Sensor0 的 RAW Bayer 数据
v4l2-ctl -d /dev/video0
--set-fmt-video=width=1920,height=1080,pixelformat=RG12
--stream-mmap
--stream-count=1
--stream-to=/tmp/sensor0_frame.raw
#
# v4l2-ctl -d /dev/video22 --set-fmt-video=width=1920,height=1080,pixelformat=NV12 --stream-mmap --stream-count=1 --stream-to=/tmp/isp_yuv.nv12
[ 26.057063] stream_cif_mipi_id0: s_power 1, entity use_count 1
[ 26.066436] rkisp_hw ffa00000.rkisp: set isp clk = 198000000Hz
[ 26.077134] rkcif-mipi-lvds: stream[0] start streaming
[ 26.077250] rockchip-mipi-csi2 mipi0-csi2: stream on, src_sd: 421a7573, sd_name:rockchip-csi2-dphy1
[ 26.077265] rockchip-mipi-csi2 mipi0-csi2: stream ON
[ 26.077316] rockchip-csi2-dphy1: dphy1, data_rate_mbps 445
[ 26.077350] rockchip-csi2-dphy csi2-dphy1: csi2_dphy_s_stream stream on:1, dphy1, ret 0
<[ 26.316362] rkcif-mipi-lvds: stream[0] start stopping, total mode 0x2, cur 0x2
[ 26.349646] rockchip-mipi-csi2 mipi0-csi2: stream off, src_sd: 421a7573, sd_name:rockchip-csi2-dphy1
[ 26.349666] rockchip-mipi-csi2 mipi0-csi2: stream OFF
[ 26.349693] rockchip-csi2-dphy csi2-dphy1: csi2_dphy_s_stream_stop stream stop, dphy1
# [ 26.349711] rockchip-csi2-dphy csi2-dphy1: csi2_dphy_s_stream stream on:0, dphy1, ret 0
[ 26.357063] rkcif-mipi-lvds: stream[0] stopping finished, dma_en 0x0
[ 26.357079] rkcif-mipi-lvds: stream[0] start stopping, total mode 0x0, cur 0x2
[ 26.357087] rkcif-mipi-lvds: stream[0] stopping finished, dma_en 0x0
[ 26.361244] stream_cif_mipi_id0: s_power 0, entity use_count 0
#
# 列出所有视频设备
v4l2-ctl --list-devices
# 检查 video22 设备能力(摄像头0主路径)
v4l2-ctl -d /dev/video22 --all
# 检查 video32 设备能力(摄像头1主路径)
v4l2-ctl -d /dev/video32 --all
查看路径
# grep -H '' /sys/class/video4linux/video*/name
/sys/class/video4linux/video0/name:stream_cif_mipi_id0
/sys/class/video4linux/video1/name:stream_cif_mipi_id1
/sys/class/video4linux/video10/name:rkcif_tools_id2
/sys/class/video4linux/video11/name:stream_cif_mipi_id0
/sys/class/video4linux/video12/name:stream_cif_mipi_id1
/sys/class/video4linux/video13/name:stream_cif_mipi_id2
/sys/class/video4linux/video14/name:stream_cif_mipi_id3
/sys/class/video4linux/video15/name:rkcif_scale_ch0
/sys/class/video4linux/video16/name:rkcif_scale_ch1
/sys/class/video4linux/video17/name:rkcif_scale_ch2
/sys/class/video4linux/video18/name:rkcif_scale_ch3
/sys/class/video4linux/video19/name:rkcif_tools_id0
/sys/class/video4linux/video2/name:stream_cif_mipi_id2
/sys/class/video4linux/video20/name:rkcif_tools_id1
/sys/class/video4linux/video21/name:rkcif_tools_id2
/sys/class/video4linux/video22/name:rkisp_mainpath
/sys/class/video4linux/video23/name:rkisp_selfpath
/sys/class/video4linux/video24/name:rkisp_bypasspath
/sys/class/video4linux/video25/name:rkisp_mainpath_4x4sampling
/sys/class/video4linux/video26/name:rkisp_bypasspath_4x4sampling
/sys/class/video4linux/video27/name:rkisp_lumapath
/sys/class/video4linux/video28/name:rkisp_rawrd0_m
/sys/class/video4linux/video29/name:rkisp_rawrd2_s
/sys/class/video4linux/video3/name:stream_cif_mipi_id3
/sys/class/video4linux/video30/name:rkisp-statistics
/sys/class/video4linux/video31/name:rkisp-input-params
/sys/class/video4linux/video32/name:rkisp_mainpath
/sys/class/video4linux/video33/name:rkisp_selfpath
/sys/class/video4linux/video34/name:rkisp_bypasspath
/sys/class/video4linux/video35/name:rkisp_mainpath_4x4sampling
/sys/class/video4linux/video36/name:rkisp_bypasspath_4x4sampling
/sys/class/video4linux/video37/name:rkisp_lumapath
/sys/class/video4linux/video38/name:rkisp_rawrd0_m
/sys/class/video4linux/video39/name:rkisp_rawrd2_s
/sys/class/video4linux/video4/name:rkcif_scale_ch0
/sys/class/video4linux/video40/name:rkisp-statistics
/sys/class/video4linux/video41/name:rkisp-input-params
/sys/class/video4linux/video5/name:rkcif_scale_ch1
/sys/class/video4linux/video6/name:rkcif_scale_ch2
/sys/class/video4linux/video7/name:rkcif_scale_ch3
/sys/class/video4linux/video8/name:rkcif_tools_id0
/sys/class/video4linux/video9/name:rkcif_tools_id1
# 14、iq文件路径
XCORE:E:access /etc/iqfiles/mis20s11_CMK-OT2115-PC1_30IRC-F16.json && /etc/iqfiles/mis20s11_CMK-OT2115-PC1_30IRC-F16.bin failed!
# ls -ll /etc/iqfiles lrwxrwxrwx 1 1000 1000 24 /etc/iqfiles -> ../oem/usr/share/iqfiles
15、脚本rv1106-spi_nor-post.sh
project/cfg/BoardConfig_IPC/rv1106-spi_nor-post.sh
16、BoardConfig.mk添加配置拷⻉对应的Sensor IQ效果⽂件
export RK_CAMERA_SENSOR_IQFILES="sc530ai_CMK-OT2115-PC1_30IRC-F16.json"
iq文件则放在下面路径,编译后会自动拷贝到output/out/oem/usr/share/iqfiles/
media/isp/release_camera_engine_rkaiq_rv1106_arm-rockchip830-linux-uclibcgnueabihf/isp_iqfiles/mis20s1_CMK-OT2115-PC1_30IRC-F16.json
17、查看ISP是否工作
下面是rkisp-vir0正常工作 , rkisp-vir1异常
# cat /proc/rkisp-vir0
rkisp-vir0 Version:v02.05.00
clk_isp_core 198000000
aclk_isp 198000000
hclk_isp 148500000
clk_isp_core_vicap 0
Interrupt Cnt:16032 ErrCnt:0
Input rkcif-mipi-lvds Format:SGRBG12_1X12 Size:1920x1080@30fps Offset(0,0)
Isp Read mode:frame1 (frame:8015 rate:99ms state:idle time:11ms frameloss:0) cnt(total:8015 X1:8015 X2:-1 X3:-1) rd_bufcnt:0
hw link:2 idle:1 vir(mode:1 index:0)
Output rkisp_mainpath Format:NV12 Size:1920x1080 Dcrop(0,0|1920x1080) (frame:8015 rate:100ms delay:44ms frameloss:0 bufcnt:2)
Output rkisp_selfpath Format:NV12 Size:720x576 Dcrop(0,0|1920x1080) (frame:8015 rate:100ms delay:44ms frameloss:0 bufcnt:2)
ISP2ENC offline warp:0
MIR_FLIP mirror:0 flip(mp:0 sp:0 bp:0 mpds:0 bpds:0)
BAYNR ON(0x10001)
GIC ON(0x1)
CAC OFF(0x0)
VSM OFF(0x0)
SDG OFF(0x6397)
AWBGAIN ON(0x6397) (gain0:0x01000100 0x01000100 gain1:0x1110111 0x23401fa)
CMSK OFF(0x0)
DPCC0 ON(0x5)
DPCC1 ON(0x5)
BLS ON(0x31)
LSC OFF(0x0)
DEBAYER ON(0x101)
CCM ON(0x1)
GAMMA_OUT ON(0x5)
CPROC ON(0xf)
IE OFF(0x0) (effect: BLACKWHITE)
HDRDRC ON(0x1)
HDRMGE OFF(0x0)
BAY3D ON(0x2001 0x289) bypass:0 bwsaving:1 mode:(lo4x8 sram)
YNR ON(0x4001001)
CNR ON(0x11)
SHARP ON(0x21)
DHAZ ON(0x16110011)
3DLUT ON(0x1)
LDCH OFF(0x0)
CSM FULL(0x6397), y_offs:0x0 c_offs:0x80
coeff Y:0x26 0x4b 0xf CB:0x1ea 0x1d6 0x40 CR:0x40 0x1ca 0x1f6
GAIN ON(0x111011)
RAWAF OFF(0x11007e)
RAWAWB ON(0x1332e887)
RAWAE0 ON(0x3)
RAWAE1 ON(0xf5)
RAWAE3 ON(0xf5)
RAWHIST0 ON(0x501)
RAWHIST1 ON(0x20000501)
RAWHIST3 ON(0x20000501)
BigMode ON(0x30000008)
OB ON(0x100)
DEBUG1 space full status group (0xfccfffff)
ibuf2:0xf ibuf1:0xc ibuf0:0xc mpfbc_infifo:0xf
r1fifo:0xf r0fifo:0xf outfifo:0xf lafifo:0xf
DEBUG2 0x0
bay3d_fifo_full iir:0 cur:0
module outform vertical counter:0, out frame counter:0
isp output line counter:0
DEBUG3 isp pipeline group (0x55555455)
mge(0 1) rawnr(0 1) bay3d(0 1) tmo(0 1)
gic(0 1) dbr(0 1) debayer(0 1) dhaz(0 1)
lut3d(0 1) ldch(0 1) ynr(0 1) shp(0 0)
cgc(0 1) cac(0 1) isp_out(0 1) isp_in(0 1)
DEBUG4 isp pipeline group (0x5)
expd(0 1) ynr(0 1)
Monitor OFF Cnt:0
Debug mode:0x0
#
#
# cat /proc/rkisp-vir1
rkisp-vir1 Version:v02.05.00
clk_isp_core 198000000
aclk_isp 198000000
hclk_isp 148500000
clk_isp_core_vicap 0
Interrupt Cnt:2 ErrCnt:0
Input rkcif-mipi-lvds1 Format:SGRBG12_1X12 Size:1920x1080@30fps Offset(0,0)
#
#
# 选择video22 取出isp流
ctx->vi[i].s32DevId = 0; //sensor0
ctx->vi[i].u32PipeId = 0;
ctx->vi[i].s32ChnId = 0; //0是选择isp的video22节点 1是选择isp的video23节点
选择video32 取出isp流
ctx->vi[i].s32DevId = 1; //sensor1
ctx->vi[i].u32PipeId = 1;
ctx->vi[i].s32ChnId = 0; //选择video32 如果是1则选择video33
18、调试命令
1、查看vi 信息 dumpsys vi
# dumpsys vi
-------------------------------------------------------------------------------
DUMP OF SERVICE vi:
---------------------- vi module_param ----------------------------
vi_max_chn_num
6
---------------------- vi chn attr ----------------------------
pipe chn width height max_width max_height compress_mode memory_type buf_type pix_format buf_cnt buf_size entity_name
0 0 1920 1080 0 0 0 DMA 0 image:nv12 2 3133440 rkisp_mainpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
0 1 720 576 0 0 0 DMA 0 image:nv12 2 622080 rkisp_selfpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
1 0 1920 1080 0 0 0 DMA 0 image:nv12 2 3133440 rkisp_mainpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
1 1 720 576 0 0 0 DMA 0 image:nv12 2 622080 rkisp_selfpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
---------------------- vi chn query state ----------------------------
pipe chn width height enabled in-lost out-lost framerate vbfail freeze
0 0 1920 1080 1 0 2 0 0 0
0 1 720 576 1 0 2 0 0 0
1 0 1920 1080 1 0 2 0 0 0
1 1 720 576 1 0 2 0 0 0
---------------------- vi chn get buf state ----------------------------
pipe chn pts delay_us get_cnt release_cnt commit_cnt refs
0 0 0 459712996 0 0 0 0 0 0 0 0 0 0 0
0 1 0 459713048 0 0 0 0 0 0 0 0 0 0 0
1 0 0 459713100 0 0 0 0 0 0 0 0 0 0 0
1 1 0 459713139 0 0 0 0 0 0 0 0 0 0 0
-------------------------------------------------------------------------------
END DUMP OF SERVICE vi:
# dumpsys vi
-------------------------------------------------------------------------------
DUMP OF SERVICE vi:
---------------------- vi module_param ----------------------------
vi_max_chn_num
6
---------------------- vi chn attr ----------------------------
pipe chn width height max_width max_height compress_mode memory_type buf_type pix_format buf_cnt buf_size entity_name
0 0 1920 1080 0 0 0 DMA 0 image:nv12 2 3133440 rkisp_mainpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
0 1 720 576 0 0 0 DMA 0 image:nv12 2 622080 rkisp_selfpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
1 0 1920 1080 0 0 0 DMA 0 image:nv12 2 3133440 rkisp_mainpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
1 1 720 576 0 0 0 DMA 0 image:nv12 2 622080 rkisp_selfpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
---------------------- vi chn query state ----------------------------
pipe chn width height enabled in-lost out-lost framerate vbfail freeze
0 0 1920 1080 1 0 2 0 0 0
0 1 720 576 1 0 2 0 0 0
1 0 1920 1080 1 0 2 0 0 0
1 1 720 576 1 0 2 0 0 0
---------------------- vi chn get buf state ----------------------------
pipe chn pts delay_us get_cnt release_cnt commit_cnt refs
0 0 0 460901056 0 0 0 0 0 0 0 0 0 0 0
0 1 0 460901114 0 0 0 0 0 0 0 0 0 0 0
1 0 0 460901171 0 0 0 0 0 0 0 0 0 0 0
1 1 0 460901215 0 0 0 0 0 0 0 0 0 0 0
-------------------------------------------------------------------------------
END DUMP OF SERVICE vi:
# dumpsys vi
-------------------------------------------------------------------------------
DUMP OF SERVICE vi:
---------------------- vi module_param ----------------------------
vi_max_chn_num
6
---------------------- vi chn attr ----------------------------
pipe chn width height max_width max_height compress_mode memory_type buf_type pix_format buf_cnt buf_size entity_name
0 0 1920 1080 0 0 0 DMA 0 image:nv12 2 3133440 rkisp_mainpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
0 1 720 576 0 0 0 DMA 0 image:nv12 2 622080 rkisp_selfpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
1 0 1920 1080 0 0 0 DMA 0 image:nv12 2 3133440 rkisp_mainpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
1 1 720 576 0 0 0 DMA 0 image:nv12 2 622080 rkisp_selfpath
depth src_frm_rate dst_frm_rate mirror flip cap_type libv4l2
0 -1 -1 0 0 1 Used
---------------------- vi chn query state ----------------------------
pipe chn width height enabled in-lost out-lost framerate vbfail freeze
0 0 1920 1080 1 0 2 0 0 0
0 1 720 576 1 0 2 0 0 0
1 0 1920 1080 1 0 2 0 0 0
1 1 720 576 1 0 2 0 0 0
---------------------- vi chn get buf state ----------------------------
pipe chn pts delay_us get_cnt release_cnt commit_cnt refs
0 0 0 461901144 0 0 0 0 0 0 0 0 0 0 0
0 1 0 461901213 0 0 0 0 0 0 0 0 0 0 0
1 0 0 461901264 0 0 0 0 0 0 0 0 0 0 0
1 1 0 461901309 0 0 0 0 0 0 0 0 0 0 0
-------------------------------------------------------------------------------
END DUMP OF SERVICE vi:
# 2、查看venc信息 dumpsys venc
# dumpsys venc
-------------------------------------------------------------------------------
DUMP OF SERVICE venc:
---------------------- venc module_param ----------------------------
venc_max_chn_num buf_cache frm_buf_cyc 264_one_pkt 265_one_pkt jpeg_one_pkt
64 0 0 one one one
---------------------- venc chn attr ----------------------------
id width height vir_w vir_h codec_type pix_format buf_count buf_size rc_mode gop_mode gop vir_idr_len
0 1920 1080 1920 1080 12 image:nv12 3 3110400 H265CBR NORMALP 50 0
1 720 576 720 576 12 image:nv12 3 622080 H265CBR NORMALP 50 0
2 1920 1080 1920 1080 12 image:nv12 3 3110400 H265CBR NORMALP 50 0
3 720 576 720 576 12 image:nv12 3 622080 H265CBR NORMALP 50 0
---------------------- venc chn query stat ----------------------------
id left_pics left_strm_bytes left_strm_frms cur_packs left_recv_pics
0 0 0 0 0 0
1 0 0 0 0 0
2 0 0 0 0 0
3 0 0 0 0 0
---------------------- venc chn rc info1 ----------------------------
id start_qp step_qp max_qp min_qp max_i_qp min_i_qp delt_ip_qp max_reenc_times qfactor qf_min qf_max
0 26 0 51 10 51 10 0 0 0 0 0
1 26 0 51 10 51 10 0 0 0 0 0
2 26 0 51 10 51 10 0 0 0 0 0
3 26 0 51 10 51 10 0 0 0 0 0
---------------------- venc chn rc info2 ----------------------------
id stat_time set_min_bps set_avg_bps set_max_bps get_min_bps get_avg_bps get_max_bps
0 3 3840000 4096000 4352000 0 0 0
1 3 3840000 4096000 4352000 0 0 0
2 3 3840000 4096000 4352000 0 0 0
3 3 3840000 4096000 4352000 0 0 0
---------------------- venc chn roi info ----------------------------
id index is_intra abs_qp qp x y width height
---------------------- venc chn dump status ----------------------------
id in_fps out_fps seq snap_set attach attach_cnt attach_size fail_strm_cnt
0 0.00 0.00 13108 -1 N 0 0 0
1 0.00 0.00 13108 -1 N 0 0 0
2 0.00 0.00 13101 -1 N 0 0 0
3 0.00 0.00 13103 -1 N 0 0 0
---------------------- venc chn param ----------------------------
id crop_mode src_x src_y src_w src_h dst_x dst_y dst_w dst_y fps_en src_fps_set dst_fps_set
0 none 0 0 0 0 0 0 0 0 1 30/1 30/1
1 none 0 0 0 0 0 0 0 0 1 30/1 30/1
2 none 0 0 0 0 0 0 0 0 1 30/1 30/1
3 none 0 0 0 0 0 0 0 0 1 30/1 30/1
---------------------- venc chn frame dump info1 ----------------------------
id width height vir_w vir_h hor_w ver_h format afbc_mode eos pts delay_us lost
0 1920 1080 0 0 1920 1080 image:nv12 0x0 0 0 481687756 0
1 720 576 0 0 720 576 image:nv12 0x0 0 0 481687961 0
2 1920 1080 0 0 1920 1080 image:nv12 0x0 0 0 481688084 0
3 720 576 0 0 720 576 image:nv12 0x0 0 0 481688214 0
---------------------- venc chn frame dump info2 ----------------------------
id rect_x rect_y rect_w rect_h
0 0 0 0 0
1 0 0 0 0
2 0 0 0 0
3 0 0 0 0
---------------------- venc chn dump base config ----------------------------
id rotation mirror
0 0 none
1 0 none
2 0 none
3 0 none
---------------------- venc chn dump jpeg config ----------------------------
id qfactor y_qt_sum cb_qt_sum cr_qt_sum mcu_per_ecs
---------------------- venc chn dump mjpeg config ----------------------------
id y_qt_sum cb_qt_sum cr_qt_sum mcu_per_ecs
---------------------- venc chn dump h264 config ----------------------------
id intra_pred tran_mode chroma_qp entropy cabac_init dblk_dis dblk_a dblk_b full_range
---------------------- venc chn dump h265 config ----------------------------
id cb_qp cr_qp scaling_list dblk_dis dblk_a dblk_b sao_luma sao_cr pu_sis_en full_range
0 -6 -6 0 0 0 0 1 1 1 Y
1 -6 -6 0 0 0 0 1 1 1 Y
2 -6 -6 0 0 0 0 1 1 1 Y
3 -6 -6 0 0 0 0 1 1 1 Y
---------------------- venc chn dump rc adv param ----------------------------
id clear_stat
0 1
1 1
2 1
3 1
---------------------- venc chn dump super frm ----------------------------
id super_frm_mode rc_priority Iframe_bits_thr Pframe_bits_thr
0 0 0 0 0
1 0 0 0 0
2 0 0 0 0
3 0 0 0 0
---------------------- venc chn dump frm lost ----------------------------
id frm_lost_open frm_lost_bps_thr frm_lost_mode enc_frm_gaps
0 0 0 0 0
1 0 0 0 0
2 0 0 0 0
3 0 0 0 0
---------------------- venc chn dump intra refresh ----------------------------
id refresh_en refresh_mode refresh_num req_i_qp
0 0 0 0 0
1 0 0 0 0
2 0 0 0 0
3 0 0 0 0
---------------------- venc chn dump hierarchical qp ----------------------------
id hier_qp_en hier_qp_delta hier_frame_num
0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0
2 0 0 0 0 0 0 0 0 0
3 0 0 0 0 0 0 0 0 0
---------------------- venc chn dump de breath effect ----------------------------
id de_breath_en strength0 strength1
0 0 0 0
1 0 0 0
2 0 0 0
3 0 0 0
---------------------- venc chn dump slice split ----------------------------
id enable mode size
0 N 0 0
1 N 0 0
2 N 0 0
3 N 0 0
-------------------------------------------------------------------------------
END DUMP OF SERVICE venc:
3、查看 vi节点创建 与 绑定 cat /dev/mpi/vlog
# cat /dev/mpi/vlog
[mb ][inf][ 2.13156 ] {valloc_probe :0661} rk dma heap addr = 00000000 size = 0
[venc ][inf][ 2.15651 ] {venc_probe :2597} create thread ef13913e
[sys ][inf][ 2.21044 ] {vmcu_probe :0409} open fp = 4d82b271
[sys ][inf][ 2.21605 ] {vmcu_probe :0419} size = 4448, pos = 4448
[sys ][inf][ 2.22373 ] {vmcu_probe :0461} log buf = b8ab9040, len = 8192
[cmpi ][inf][ 44.456938] {vlog_set_level :0148} mod = 24, level = 4
[vi ][inf][ 44.461600] {vi_open :0922} --------- vi open ----------
[avs ][inf][ 44.461626] {avs_dev_open :0678} --------- avs dev open ----------
[cmpi ][inf][ 44.461646] {vrga_open :0608} --------- vrga open ----------
[aiisp ][inf][ 44.461673] {aiisp_dev_open :0604} --------- aiisp dev open ----------
[vi ][inf][ 44.488665] {vi_open :0922} --------- vi open ----------
[vi ][inf][ 44.497588] {vvi_node_create :0177} vi_pri_data pipeId: 0 chnId:0--->>>
[vi ][inf][ 44.497611] {vvi_node_create :0186} >>>>>> videv 0: 3f8a372b, driver: rkisp-vir0
[vi ][inf][ 44.497625] {vvi_node_create :0194} width = 1920, height = 1080, max_res_width = 0, max_res_height = 0, enAllocBufType = 0
[vi ][inf][ 44.497670] {vvi_node_create :0202} vvi dev:0, chn:0 node create success
[vi ][inf][ 44.501905] {vvi_node_create :0224} vvi_node_create chn:0 pool create bufcnt:2
[vi ][inf][ 44.501926] {vvi_node_create :0248} chn:0 depth: 0
[vi ][inf][ 44.501934] {vvi_node_create :0253} vvi_node_create done
[vi ][inf][ 44.507513] {vvi_node_start :0411} stWindow = 0, 0, 0, 0, stMaxsize = 0, 0
[vi ][inf][ 44.508292] {vvi_node_start :0432} vvi_node_start done
[vi ][inf][ 44.535286] {vi_open :0922} --------- vi open ----------
[vi ][inf][ 44.665735] {vvi_node_create :0177} vi_pri_data pipeId: 0 chnId:1--->>>
[vi ][inf][ 44.665757] {vvi_node_create :0186} >>>>>> videv 0: 3f8a372b, driver: rkisp-vir0
[vi ][inf][ 44.665772] {vvi_node_create :0194} width = 720, height = 576, max_res_width = 0, max_res_height = 0, enAllocBufType = 0
[vi ][inf][ 44.665817] {vvi_node_create :0202} vvi dev:0, chn:1 node create success
[vi ][inf][ 44.666755] {vvi_node_create :0224} vvi_node_create chn:1 pool create bufcnt:2
[vi ][inf][ 44.666770] {vvi_node_create :0248} chn:1 depth: 0
[vi ][inf][ 44.666779] {vvi_node_create :0253} vvi_node_create done
[vi ][inf][ 44.673485] {vvi_node_start :0411} stWindow = 0, 0, 0, 0, stMaxsize = 0, 0
[vi ][inf][ 44.673797] {vvi_node_start :0432} vvi_node_start done
[vi ][inf][ 44.678229] {vi_open :0922} --------- vi open ----------
[vi ][inf][ 44.683876] {vvi_node_create :0177} vi_pri_data pipeId: 1 chnId:0--->>>
[vi ][inf][ 44.683897] {vvi_node_create :0186} >>>>>> videv 1: f199d889, driver: rkisp-vir1
[vi ][inf][ 44.683913] {vvi_node_create :0194} width = 1920, height = 1080, max_res_width = 0, max_res_height = 0, enAllocBufType = 0
[vi ][inf][ 44.683962] {vvi_node_create :0202} vvi dev:1, chn:0 node create success
[vi ][inf][ 44.688177] {vvi_node_create :0224} vvi_node_create chn:0 pool create bufcnt:2
[vi ][inf][ 44.688195] {vvi_node_create :0248} chn:0 depth: 0
[vi ][inf][ 44.688205] {vvi_node_create :0253} vvi_node_create done
[vi ][inf][ 44.693288] {vvi_node_start :0411} stWindow = 0, 0, 0, 0, stMaxsize = 0, 0
[vi ][inf][ 44.694116] {vvi_node_start :0432} vvi_node_start done
[vi ][inf][ 44.706551] {vi_open :0922} --------- vi open ----------
[vi ][inf][ 44.713432] {vvi_node_create :0177} vi_pri_data pipeId: 1 chnId:1--->>>
[vi ][inf][ 44.713455] {vvi_node_create :0186} >>>>>> videv 1: f199d889, driver: rkisp-vir1
[vi ][inf][ 44.713478] {vvi_node_create :0194} width = 720, height = 576, max_res_width = 0, max_res_height = 0, enAllocBufType = 0
[vi ][inf][ 44.713537] {vvi_node_create :0202} vvi dev:1, chn:1 node create success
[vi ][inf][ 44.714465] {vvi_node_create :0224} vvi_node_create chn:1 pool create bufcnt:2
[vi ][inf][ 44.714480] {vvi_node_create :0248} chn:1 depth: 0
[vi ][inf][ 44.714488] {vvi_node_create :0253} vvi_node_create done
[vi ][inf][ 44.721314] {vvi_node_start :0411} stWindow = 0, 0, 0, 0, stMaxsize = 0, 0
[vi ][inf][ 44.721652] {vvi_node_start :0432} vvi_node_start done
[cmpi ][inf][ 44.728546] {vsys_bind :0300} SRC mod,dev,chn(8-0-0) bind DEST mod,dev,chn(4-0-0) success!
[cmpi ][inf][ 44.728583] {vsys_bind :0300} SRC mod,dev,chn(8-0-1) bind DEST mod,dev,chn(4-0-1) success!
[cmpi ][inf][ 44.728598] {vsys_bind :0300} SRC mod,dev,chn(8-1-0) bind DEST mod,dev,chn(4-0-2) success!
[cmpi ][inf][ 44.728646] {vsys_bind :0300} SRC mod,dev,chn(8-1-1) bind DEST mod,dev,chn(4-0-3) success!4、查看mipi输入帧率# cat /proc/rkcif-mipi-lvds1 | grep fps
# cat /proc/rkcif-mipi-lvds1 | grep fps
fps:30
5、查看isp工作状态
cat /proc/rkisp-vir0 cat /proc/rkisp-vir1
19、V4L2取流demo
/*
* V4L2 video capture example
*
* Copyright (C) 2022 Rockchip Electronics Co., Ltd.
* Authors:
*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <assert.h>
#include <getopt.h> /* getopt_long() */
#include <fcntl.h> /* low-level i/o */
#include <unistd.h>
#include <errno.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/time.h>
#include <sys/mman.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
#define CLEAR(x) memset(&(x), 0, sizeof(x))
#define FMT_NUM_PLANES 1
enum io_method {
IO_METHOD_READ,
IO_METHOD_MMAP,
IO_METHOD_USERPTR,
};
struct buffer {
void *start;
size_t length;
};
static char *dev_name;
static char *streamfile_name;
static enum io_method io = IO_METHOD_MMAP;
static int fd = -1;
struct buffer *buffers;
static unsigned int n_buffers;
static int out_buf;
// static int force_format;
static int frame_count = 10;
static int width = 1920;
static int height = 1080;
static int format = V4L2_PIX_FMT_NV12;
static void errno_exit(const char *s)
{
fprintf(stderr, "%s error %d, %s
", s, errno, strerror(errno));
exit(EXIT_FAILURE);
}
static int xioctl(int fh, int request, void *arg)
{
int r;
do {
r = ioctl(fh, request, arg);
} while (-1 == r && EINTR == errno);
return r;
}
static void process_image(const void *p, int size)
{
// if (out_buf)
// fwrite(p, size, 1, stdout);
fflush(stderr);
fprintf(stderr, ">");
// fflush(stdout);
char file_name[64] = {0};
FILE *fp = NULL;
// snprintf(file_name, sizeof(file_name),
// "/data/dump_%dx%d.yuv", width, height);
snprintf(file_name, sizeof(file_name),
"%s", streamfile_name);
fp = fopen(file_name, "ab+");
if (fp == NULL) {
printf("fopen yuv file %s failed!
", file_name);
return;
}
// printf("size %d
", size);
fwrite(p, size, 1, fp);
// printf("Write success YUV data to %s",file_name);
fflush(fp);
}
static int read_frame(void)
{
struct v4l2_buffer buf;
struct v4l2_plane planes[FMT_NUM_PLANES];
unsigned int i;
int bytesused;
switch (io) {
case IO_METHOD_READ:
if (-1 == read(fd, buffers[0].start, buffers[0].length)) {
switch (errno) {
case EAGAIN:
return 0;
case EIO:
/* Could ignore EIO, see spec. */
/* fall through */
default:
errno_exit("read");
}
}
process_image(buffers[0].start, buffers[0].length);
break;
case IO_METHOD_MMAP:
CLEAR(buf);
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4L2_MEMORY_MMAP;
// struct v4l2_plane planes[FMT_NUM_PLANES];
memset(planes, 0, sizeof(struct v4l2_plane)*FMT_NUM_PLANES);
if (V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE == buf.type) {
buf.m.planes = planes;
buf.length = FMT_NUM_PLANES;
}
if (-1 == xioctl(fd, VIDIOC_DQBUF, &buf)) {
switch (errno) {
case EAGAIN:
return 0;
case EIO:
/* Could ignore EIO, see spec. */
/* fall through */
default:
errno_exit("VIDIOC_DQBUF");
}
}
if (V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE == buf.type)
bytesused = buf.m.planes[0].bytesused;
else
bytesused = buf.bytesused;
assert(buf.index < n_buffers);
process_image(buffers[buf.index].start, bytesused);
if (-1 == xioctl(fd, VIDIOC_QBUF, &buf))
errno_exit("VIDIOC_QBUF");
break;
case IO_METHOD_USERPTR:
CLEAR(buf);
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4L2_MEMORY_USERPTR;
if (-1 == xioctl(fd, VIDIOC_DQBUF, &buf)) {
switch (errno) {
case EAGAIN:
return 0;
case EIO:
/* Could ignore EIO, see spec. */
/* fall through */
default:
errno_exit("VIDIOC_DQBUF");
}
}
if (V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE == buf.type)
bytesused = buf.m.planes[0].bytesused;
else
bytesused = buf.bytesused;
for (i = 0; i < n_buffers; ++i)
if (buf.m.userptr == (unsigned long)buffers[i].start
&& buf.length == buffers[i].length)
break;
assert(i < n_buffers);
process_image((void *)buf.m.userptr, bytesused);
if (-1 == xioctl(fd, VIDIOC_QBUF, &buf))
errno_exit("VIDIOC_QBUF");
break;
}
return 1;
}
static void mainloop(void)
{
unsigned int count;
count = frame_count;
while (count-- > 0) {
for (;;) {
fd_set fds;
struct timeval tv;
int r;
FD_ZERO(&fds);
FD_SET(fd, &fds);
/* Timeout. */
tv.tv_sec = 2;
tv.tv_usec = 0;
r = select(fd + 1, &fds, NULL, NULL, &tv);
if (-1 == r) {
if (EINTR == errno)
continue;
errno_exit("select");
}
if (0 == r) {
fprintf(stderr, "select timeout
");
exit(EXIT_FAILURE);
}
if (read_frame())
break;
/* EAGAIN - continue select loop. */
}
}
}
static void stop_capturing(void)
{
enum v4l2_buf_type type;
switch (io) {
case IO_METHOD_READ:
/* Nothing to do. */
break;
case IO_METHOD_MMAP:
case IO_METHOD_USERPTR:
type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
if (-1 == xioctl(fd, VIDIOC_STREAMOFF, &type))
errno_exit("VIDIOC_STREAMOFF");
break;
}
}
static void start_capturing(void)
{
unsigned int i;
enum v4l2_buf_type type;
switch (io) {
case IO_METHOD_READ:
/* Nothing to do. */
break;
case IO_METHOD_MMAP:
for (i = 0; i < n_buffers; ++i) {
struct v4l2_buffer buf;
CLEAR(buf);
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
if (V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE == buf.type) {
struct v4l2_plane planes[FMT_NUM_PLANES];
buf.m.planes = planes;
buf.length = FMT_NUM_PLANES;
}
if (-1 == xioctl(fd, VIDIOC_QBUF, &buf))
errno_exit("VIDIOC_QBUF");
}
type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
if (-1 == xioctl(fd, VIDIOC_STREAMON, &type))
errno_exit("VIDIOC_STREAMON");
break;
case IO_METHOD_USERPTR:
for (i = 0; i < n_buffers; ++i) {
struct v4l2_buffer buf;
CLEAR(buf);
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4L2_MEMORY_USERPTR;
buf.index = i;
buf.m.userptr = (unsigned long)buffers[i].start;
buf.length = buffers[i].length;
if (-1 == xioctl(fd, VIDIOC_QBUF, &buf))
errno_exit("VIDIOC_QBUF");
}
type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
if (-1 == xioctl(fd, VIDIOC_STREAMON, &type))
errno_exit("VIDIOC_STREAMON");
break;
}
}
static void uninit_device(void)
{
unsigned int i;
switch (io) {
case IO_METHOD_READ:
free(buffers[0].start);
break;
case IO_METHOD_MMAP:
for (i = 0; i < n_buffers; ++i)
if (-1 == munmap(buffers[i].start, buffers[i].length))
errno_exit("munmap");
break;
case IO_METHOD_USERPTR:
for (i = 0; i < n_buffers; ++i)
free(buffers[i].start);
break;
}
free(buffers);
}
static void init_read(unsigned int buffer_size)
{
buffers = calloc(1, sizeof(*buffers));
if (!buffers) {
fprintf(stderr, "Out of memory
");
exit(EXIT_FAILURE);
}
buffers[0].length = buffer_size;
buffers[0].start = malloc(buffer_size);
if (!buffers[0].start) {
fprintf(stderr, "Out of memory
");
exit(EXIT_FAILURE);
}
}
static void init_mmap(void)
{
struct v4l2_requestbuffers req;
CLEAR(req);
req.count = 4;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
req.memory = V4L2_MEMORY_MMAP;
if (-1 == xioctl(fd, VIDIOC_REQBUFS, &req)) {
if (EINVAL == errno) {
fprintf(stderr, "%s does not support "
"memory mappingn", dev_name);
exit(EXIT_FAILURE);
} else {
errno_exit("VIDIOC_REQBUFS");
}
}
if (req.count < 2) {
fprintf(stderr, "Insufficient buffer memory on %s
",
dev_name);
exit(EXIT_FAILURE);
}
buffers = calloc(req.count, sizeof(*buffers));
if (!buffers) {
fprintf(stderr, "Out of memory
");
exit(EXIT_FAILURE);
}
for (n_buffers = 0; n_buffers < req.count; ++n_buffers) {
struct v4l2_buffer buf;
struct v4l2_plane planes[FMT_NUM_PLANES];
CLEAR(buf);
CLEAR(planes);
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
if (V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE == buf.type) {
buf.m.planes = planes;
buf.length = FMT_NUM_PLANES;
}
if (-1 == xioctl(fd, VIDIOC_QUERYBUF, &buf))
errno_exit("VIDIOC_QUERYBUF");
buffers[n_buffers].length = buf.m.planes[0].length;
buffers[n_buffers].start =
mmap(NULL /* start anywhere */,
buf.m.planes[0].length,
PROT_READ | PROT_WRITE /* required */,
MAP_SHARED /* recommended */,
fd, buf.m.planes[0].m.mem_offset);
if (MAP_FAILED == buffers[n_buffers].start)
errno_exit("mmap");
}
}
static void init_userp(unsigned int buffer_size)
{
struct v4l2_requestbuffers req;
CLEAR(req);
req.count = 4;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
req.memory = V4L2_MEMORY_USERPTR;
if (-1 == xioctl(fd, VIDIOC_REQBUFS, &req)) {
if (EINVAL == errno) {
fprintf(stderr, "%s does not support "
"user pointer i/on", dev_name);
exit(EXIT_FAILURE);
} else {
errno_exit("VIDIOC_REQBUFS");
}
}
buffers = calloc(4, sizeof(*buffers));
if (!buffers) {
fprintf(stderr, "Out of memory
");
exit(EXIT_FAILURE);
}
for (n_buffers = 0; n_buffers < 4; ++n_buffers) {
buffers[n_buffers].length = buffer_size;
buffers[n_buffers].start = malloc(buffer_size);
if (!buffers[n_buffers].start) {
fprintf(stderr, "Out of memory
");
exit(EXIT_FAILURE);
}
}
}
static void init_device(void)
{
struct v4l2_capability cap;
struct v4l2_cropcap cropcap;
struct v4l2_crop crop;
struct v4l2_format fmt;
unsigned int min;
if (-1 == xioctl(fd, VIDIOC_QUERYCAP, &cap)) {
if (EINVAL == errno) {
fprintf(stderr, "%s is no V4L2 device
",
dev_name);
exit(EXIT_FAILURE);
} else {
errno_exit("VIDIOC_QUERYCAP");
}
}
if (!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) &&
!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE_MPLANE)) {
fprintf(stderr, "%s is no video capture device
",
dev_name);
exit(EXIT_FAILURE);
}
switch (io) {
case IO_METHOD_READ:
if (!(cap.capabilities & V4L2_CAP_READWRITE)) {
fprintf(stderr, "%s does not support read i/o
",
dev_name);
exit(EXIT_FAILURE);
}
break;
case IO_METHOD_MMAP:
case IO_METHOD_USERPTR:
if (!(cap.capabilities & V4L2_CAP_STREAMING)) {
fprintf(stderr, "%s does not support streaming i/o
",
dev_name);
exit(EXIT_FAILURE);
}
break;
}
/* Select video input, video standard and tune here. */
CLEAR(cropcap);
cropcap.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
if (0 == xioctl(fd, VIDIOC_CROPCAP, &cropcap)) {
crop.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
crop.c = cropcap.defrect; /* reset to default */
if (-1 == xioctl(fd, VIDIOC_S_CROP, &crop)) {
switch (errno) {
case EINVAL:
/* Cropping not supported. */
break;
default:
/* Errors ignored. */
break;
}
}
} else {
/* Errors ignored. */
}
CLEAR(fmt);
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
// if (force_format) {
fmt.fmt.pix.width = width;
fmt.fmt.pix.height = height;
fmt.fmt.pix.pixelformat = format;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
if (-1 == xioctl(fd, VIDIOC_S_FMT, &fmt))
errno_exit("VIDIOC_S_FMT");
/* Note VIDIOC_S_FMT may change width and height. */
// } else {
// /* Preserve original settings as set by v4l2-ctl for example */
// if (-1 == xioctl(fd, VIDIOC_G_FMT, &fmt))
// errno_exit("VIDIOC_G_FMT");
// }
//fjw
// width = fmt.fmt.pix.width;
// height = fmt.fmt.pix.height;
/* Buggy driver paranoia. */
min = fmt.fmt.pix.width * 2;
if (fmt.fmt.pix.bytesperline < min)
fmt.fmt.pix.bytesperline = min;
min = fmt.fmt.pix.bytesperline * fmt.fmt.pix.height;
if (fmt.fmt.pix.sizeimage < min)
fmt.fmt.pix.sizeimage = min;
switch (io) {
case IO_METHOD_READ:
init_read(fmt.fmt.pix.sizeimage);
break;
case IO_METHOD_MMAP:
init_mmap();
break;
case IO_METHOD_USERPTR:
init_userp(fmt.fmt.pix.sizeimage);
break;
}
}
static void close_device(void)
{
if (-1 == close(fd))
errno_exit("close");
fd = -1;
}
static void open_device(void)
{
struct stat st;
if (-1 == stat(dev_name, &st)) {
fprintf(stderr, "Cannot identify '%s': %d, %s
",
dev_name, errno, strerror(errno));
exit(EXIT_FAILURE);
}
if (!S_ISCHR(st.st_mode)) {
fprintf(stderr, "%s is no devicen", dev_name);
exit(EXIT_FAILURE);
}
fd = open(dev_name, O_RDWR /* required */ | O_NONBLOCK, 0);
if (-1 == fd) {
fprintf(stderr, "Cannot open '%s': %d, %s
",
dev_name, errno, strerror(errno));
exit(EXIT_FAILURE);
}
}
static void usage(FILE *fp, int argc, char **argv)
{
fprintf(fp,
"Usage: %s [options]
"
"argc: %d"
"Version 1.3
"
"Options:
"
"-d | --device name Video device name [%s]
"
"-p | --help Print this message
"
"-w | --width width of image
"
"-h | --height height of image
"
"-m | --mmap Use memory mapped buffers [default]
"
"-r | --read Use read() calls
"
"-u | --userp Use application allocated buffers
"
"-a | --dma Use application allocated dma buffers
"
"-o | --output Outputs stream to stdout
"
"-f | --format Force format to YUYV
"
"-t | --stream-to stream-to file default /data/dump_out.yuv
"
"-c | --count Number of frames to grab [%i]
"
"-b | --test test
"
"",
argv[0], argc, dev_name, frame_count);
}
static const char short_options[] = "d:pw:h:mruaof:t:c:b";
static const struct option
long_options[] = {
{ "device", required_argument, NULL, 'd' },
{ "help", no_argument, NULL, 'p' },
{ "width", required_argument, NULL, 'w' },
{ "height", required_argument, NULL, 'h' },
{ "mmap", no_argument, NULL, 'm' },
{ "read", no_argument, NULL, 'r' },
{ "userp", no_argument, NULL, 'u' },
{ "dma", no_argument, NULL, 'a' },
{ "output", no_argument, NULL, 'o' },
{ "format", required_argument, NULL, 'f' },
{ "stream-to", required_argument, NULL, 't' },
{ "count", required_argument, NULL, 'c' },
{ "test", no_argument, NULL, 'b' },
{ 0, 0, 0, 0 }
};
int main(int argc, char **argv)
{
dev_name = "/dev/video0";
streamfile_name = "/tmp/dump_out.yuv";
// stdout = fopen("out.yuv", "wb");
for (;;) {
int idx;
int c;
c = getopt_long(argc, argv,
short_options, long_options, &idx);
if (-1 == c)
break;
switch (c) {
case 0: /* getopt_long() flag */
break;
case 'd':
dev_name = optarg;
break;
case 'p':
usage(stdout, argc, argv);
exit(EXIT_SUCCESS);
case 'w':
width = strtol(optarg, NULL, 0);
break;
case 'h':
height = strtol(optarg, NULL, 0);
break;
case 'm':
io = IO_METHOD_MMAP;
break;
case 'r':
io = IO_METHOD_READ;
break;
case 'u':
io = IO_METHOD_USERPTR;
break;
case 'o':
out_buf++;
break;
case 'f':
// force_format++;
format = v4l2_fourcc(optarg[0], optarg[1], optarg[2], optarg[3]);
break;
case 't':
streamfile_name = optarg;
break;
case 'c':
errno = 0;
frame_count = strtol(optarg, NULL, 0);
if (errno)
errno_exit(optarg);
break;
default:
usage(stderr, argc, argv);
exit(EXIT_FAILURE);
}
}
open_device();
init_device();
start_capturing();
mainloop();
stop_capturing();
uninit_device();
close_device();
fprintf(stderr, "
");
return 0;
}20、修改simple_vi_get_frame,取流从第二个sensor取
--- a/media/samples/simple_test/simple_vi_get_frame.c
+++ b/media/samples/simple_test/simple_vi_get_frame.c
@@ -46,9 +46,10 @@ RK_U64 TEST_COMM_GetNowUs() {
static void *GetMediaBuffer0(void *arg) {
printf("========%s========
", __func__);
int loopCount = 0;
+ int loopFailCnt = 0;
int s32Ret;
- RK_S32 waitTime = 1000;
- int pipeId = 0;
+ RK_S32 waitTime = 3000;
+ int pipeId = 1;
int channelId = 0;
channelId = *(int *)arg;
VIDEO_FRAME_INFO_S stViFrame;
@@ -82,6 +83,10 @@ static void *GetMediaBuffer0(void *arg) {
loopCount++;
} else {
RK_LOGE("RK_MPI_VI_GetChnFrame timeout %x", s32Ret);
+ if (loopFailCnt ++ > 100 ) {
+ quit = true;
+ break;
+ }
}
if ((g_s32FrameCnt >= 0) && (loopCount > g_s32FrameCnt)) {
@@ -97,7 +102,7 @@ static void *GetMediaBuffer0(void *arg) {
int vi_dev_init() {
printf("%s
", __func__);
int ret = 0;
- int devId = 0;
+ int devId = 1;
int pipeId = devId;
VI_DEV_ATTR_S stDevAttr;
@@ -149,13 +154,13 @@ int vi_chn_init(int channelId, int width, int height) {
vi_chn_attr.stIspOpt.u32BufCount = buf_cnt;
vi_chn_attr.stIspOpt.enMemoryType =
VI_V4L2_MEMORY_TYPE_DMABUF; // VI_V4L2_MEMORY_TYPE_MMAP;
- vi_chn_attr.stSize.u32Width = 1280;
- vi_chn_attr.stSize.u32Height = 720;
+ vi_chn_attr.stSize.u32Width = width;
+ vi_chn_attr.stSize.u32Height = height;
vi_chn_attr.enPixelFormat = RK_FMT_YUV420SP;
vi_chn_attr.enCompressMode = COMPRESS_MODE_NONE; // COMPRESS_AFBC_16x16;
vi_chn_attr.u32Depth = 2; //0, get fail, 1 - u32BufCount, can get, if bind to other device, must be < u32BufCount
- ret = RK_MPI_VI_SetChnAttr(0, channelId, &vi_chn_attr);
- ret |= RK_MPI_VI_EnableChn(0, channelId);
+ ret = RK_MPI_VI_SetChnAttr(1, channelId, &vi_chn_attr);
+ ret |= RK_MPI_VI_EnableChn(1, channelId);
if (ret) {
printf("ERROR: create VI error! ret=%d
", ret);
return ret;
wzh@wzh-virtual-machine:~/work/Precision_Landing/RV1106_RV1103_LINUX_IPC$ 21、rv1106修改kernel isp部分,解决双目第二路无法出图
Author: wzh <wzh@skydroid.onaliyun.com>
Date: Mon Nov 3 14:42:43 2025 +0800
修改kernel isp部分,解决双目第二路无法出图
diff --git a/sysdrv/source/kernel/drivers/media/platform/rockchip/isp/isp_rockit.c b/sysdrv/source/kernel/drivers/media/platform/rockchip/isp/isp_rockit.c
old mode 100644
new mode 100755
index 1666d7480..9f3d45679
--- a/sysdrv/source/kernel/drivers/media/platform/rockchip/isp/isp_rockit.c
+++ b/sysdrv/source/kernel/drivers/media/platform/rockchip/isp/isp_rockit.c
@@ -39,10 +39,12 @@ static struct rkisp_stream *rkisp_rockit_get_stream(struct rockit_cfg *input_roc
return NULL;
}
+
for (i = 0; i < rockit_cfg->isp_num; i++) {
if (!strcmp(rockit_cfg->rkisp_dev_cfg[i].isp_name,
input_rockit_cfg->current_name)) {
ispdev = rockit_cfg->rkisp_dev_cfg[i].isp_dev;
+
break;
}
}
@@ -52,6 +54,8 @@ static struct rkisp_stream *rkisp_rockit_get_stream(struct rockit_cfg *input_roc
return NULL;
}
+ input_rockit_cfg->nick_id = input_rockit_cfg->nick_id % 6;
+
switch (input_rockit_cfg->nick_id) {
case 0:
stream = &ispdev->cap_dev.stream[RKISP_STREAM_MP];
@@ -97,7 +101,12 @@ int rkisp_rockit_buf_queue(struct rockit_cfg *input_rockit_cfg)
stream = rkisp_rockit_get_stream(input_rockit_cfg);
if (!stream || stream->id >= ROCKIT_STREAM_NUM_MAX) {
- pr_err("inval stream");
+ if (!stream) {
+ pr_err("can not find stream");
+ } else if (stream->id >= ROCKIT_STREAM_NUM_MAX) {
+ pr_err("invalid stream id");
+ }
+ pr_err("11111 inval stream");
return -EINVAL;
}
wzh@wzh-virtual-machine:~/work/Precision_Landing/RV1106_RV1103_LINUX_IPC$
wzh@wzh-virtual-machine:~/work/Precision_Landing/RV1106_RV1103_LINUX_IPC$
wzh@wzh-virtual-machine:~/work/Precision_Landing/RV1106_RV1103_LINUX_IPC$ 22、双路出RTSP,双路出vpss,格式为RGB888,320X180
//双目取流RKAIQ_GRP
#if 1
#include <errno.h>
#include <pthread.h>
#include <signal.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/poll.h>
#include <time.h>
#include <unistd.h>
#ifdef RV1126_RV1109
#include <rk_aiq_user_api_camgroup.h>
#include <rk_aiq_user_api_imgproc.h>
#include <rk_aiq_user_api_sysctl.h>
#else
#include <rk_aiq_user_api2_camgroup.h>
#include <rk_aiq_user_api2_imgproc.h>
#include <rk_aiq_user_api2_sysctl.h>
#endif
#include "rk_debug.h"
#include "rk_defines.h"
#include "rk_mpi_adec.h"
#include "rk_mpi_aenc.h"
#include "rk_mpi_ai.h"
#include "rk_mpi_ao.h"
#include "rk_mpi_avs.h"
#include "rk_mpi_cal.h"
#include "rk_mpi_ivs.h"
#include "rk_mpi_mb.h"
#include "rk_mpi_rgn.h"
#include "rk_mpi_sys.h"
#include "rk_mpi_tde.h"
#include "rk_mpi_vdec.h"
#include "rk_mpi_venc.h"
#include "rk_mpi_vi.h"
#include "rk_mpi_vo.h"
#include "rk_mpi_vpss.h"
#include "rtsp_demo.h"
#include "sample_comm.h"
#include <stdatomic.h>
pthread_mutex_t g_rtsp_mutex = PTHREAD_MUTEX_INITIALIZER;
static rtsp_demo_handle g_rtsplive = NULL;
static rtsp_session_handle g_rtsp_session_0, g_rtsp_session_1, g_rtsp_session_2,
g_rtsp_session_3;
typedef struct _rkMpiCtx {
SAMPLE_VI_CTX_S vi[4]; // camera 0: 0,1; camera 1: 2,3
SAMPLE_VENC_CTX_S venc[4];
} SAMPLE_MPI_CTX_S;
typedef struct VPSS_YUV_REGION_T
{
uint16_t X0;
uint16_t Y0;
uint16_t X1;
uint16_t Y1;
uint16_t width;
uint16_t height;
uint16_t cut_x;
uint16_t cut_y;
uint16_t offset_bak;
uint16_t X0_bak;
uint16_t y0_bak;
uint16_t X1_bak;
uint16_t y1_bak;
uint16_t first_offset;
pthread_mutex_t mutex;
}VPSS_YUV_REGION;
VPSS_YUV_REGION g_yuv_region;
static RK_S32 g_s32FrameCnt = -1;
static bool quit = false;
//#define RKAIQ_GRP
#define MAX_AIQ_CTX 8
static rk_aiq_sys_ctx_t *g_aiq_ctx[MAX_AIQ_CTX];
static rk_aiq_camgroup_ctx_t *g_aiq_camgroup_ctx[MAX_AIQ_CTX];
rk_aiq_working_mode_t g_WDRMode[MAX_AIQ_CTX];
static atomic_int g_sof_cnt = 0;
static atomic_bool g_should_quit = false;
static void sigterm_handler(int sig) {
fprintf(stderr, "signal %d
", sig);
quit = true;
}
RK_U64 TEST_COMM_GetNowUs() {
struct timespec time = {0, 0};
clock_gettime(CLOCK_MONOTONIC, &time);
return (RK_U64)time.tv_sec * 1000000 + (RK_U64)time.tv_nsec / 1000; /* microseconds */
}
VPSS_GRP VpssGrp = 0;
VPSS_CHN VpssChn = VPSS_CHN0;
VPSS_GRP VpssGrp2 = 1;
VPSS_CHN VpssChn2 = VPSS_CHN0;
VIDEO_FRAME_INFO_S g_pstVideoFrame;
VIDEO_FRAME_INFO_S g_pstVideoFrame2;
int sensor0_vpss_init(int vpss_width, int vpss_height)
{
VPSS_CROP_INFO_S stCropInfo;
RK_S32 s32Ret = RK_SUCCESS;
VPSS_GRP_ATTR_S stGrpVpssAttr;
VPSS_CHN_ATTR_S stVpssChnAttr;
MPP_CHN_S stViChn;
MPP_CHN_S stVpssChn;
stGrpVpssAttr.u32MaxW = vpss_width;
stGrpVpssAttr.u32MaxH = vpss_height;
stGrpVpssAttr.enPixelFormat = RK_FMT_YUV422_YUYV;
stGrpVpssAttr.enCompressMode = COMPRESS_MODE_NONE;
stGrpVpssAttr.stFrameRate.s32SrcFrameRate = -1;
stGrpVpssAttr.stFrameRate.s32DstFrameRate = -1;
s32Ret = RK_MPI_VPSS_CreateGrp(VpssGrp, &stGrpVpssAttr);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_SetChnAttr fail s32Ret:%d",s32Ret);
return s32Ret;
}
if (pthread_mutex_init(&g_yuv_region.mutex, NULL) != 0)
{
printf("&yuv_region.mutex init fail
");
return 1;
}
memset(&stVpssChnAttr, 0, sizeof(VPSS_CHN_ATTR_S));
stVpssChnAttr.enChnMode = VPSS_CHN_MODE_USER;
stVpssChnAttr.u32Width = vpss_width;
stVpssChnAttr.u32Height = vpss_height;
stVpssChnAttr.enVideoFormat = VIDEO_FORMAT_LINEAR;
stVpssChnAttr.enPixelFormat = RK_FMT_RGB888;
stVpssChnAttr.enDynamicRange = DYNAMIC_RANGE_SDR8;
stVpssChnAttr.enCompressMode = COMPRESS_MODE_NONE;
stVpssChnAttr.stFrameRate.s32SrcFrameRate = -1;
stVpssChnAttr.stFrameRate.s32DstFrameRate = -1;
stVpssChnAttr.bMirror = RK_FALSE;
stVpssChnAttr.bFlip = RK_FALSE;
stVpssChnAttr.u32Depth = 5;
stVpssChnAttr.u32FrameBufCnt = 5;
s32Ret = RK_MPI_VPSS_SetChnAttr(VpssGrp, VpssChn, &stVpssChnAttr);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_SetChnAttr fail s32Ret:%d",s32Ret);
return s32Ret;
}
s32Ret = RK_MPI_VPSS_GetChnAttr(VpssGrp, VpssChn, &stVpssChnAttr);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_GetChnAttr fail s32Ret:%d",s32Ret);
return s32Ret;
}
s32Ret = RK_MPI_VPSS_EnableChn(VpssGrp, VpssChn);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_EnableChn fail s32Ret:%d",s32Ret);
return s32Ret;
}
s32Ret = RK_MPI_VPSS_StartGrp(VpssGrp);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_StartGrp fail s32Ret:%d",s32Ret);
return s32Ret;
}
// bind vi to vpss
stViChn.enModId = RK_ID_VI;
stViChn.s32DevId = 0;
stViChn.s32ChnId = 0;
stVpssChn.enModId = RK_ID_VPSS;
stVpssChn.s32DevId = VpssGrp;
stVpssChn.s32ChnId = VpssChn;
RK_LOGE("vi to vpss ch %d vpss group %d", stVpssChn.s32ChnId , stVpssChn.s32DevId);
s32Ret = RK_MPI_SYS_Bind(&stViChn, &stVpssChn);
if (RK_SUCCESS!= s32Ret)
{
RK_LOGE("RK_MPI_SYS_Bind fail s32Ret:%d",s32Ret);
return s32Ret;
}
}
static int sensor0_get_yuv_frame(void **pdata, int *data_len)
{
int i = 1;
FILE *fp;
RK_S32 s32Ret = RK_SUCCESS;
PIC_BUF_ATTR_S stPicBufAttr;
MB_PIC_CAL_S stMbPicCalResult;
VPSS_GRP iVpssGrp = 0;
VPSS_CHN iVpssChn = VPSS_CHN0;
memset(&g_pstVideoFrame,0,sizeof(VIDEO_FRAME_INFO_S));
//RK_LOGE("wzh get_yuv_frame");
s32Ret = RK_MPI_VPSS_GetChnFrame(VpssGrp, VpssChn, &g_pstVideoFrame, -1);
if (RK_SUCCESS!= s32Ret)
{
RK_LOGE("RK_MPI_VPSS_GetChnFrame fail s32Ret:%x",s32Ret);
return s32Ret;
}
stPicBufAttr.u32Width = g_pstVideoFrame.stVFrame.u32VirWidth;
stPicBufAttr.u32Height = g_pstVideoFrame.stVFrame.u32VirHeight;
stPicBufAttr.enPixelFormat = g_pstVideoFrame.stVFrame.enPixelFormat;
stPicBufAttr.enCompMode = g_pstVideoFrame.stVFrame.enCompressMode;
s32Ret = RK_MPI_CAL_VGS_GetPicBufferSize(&stPicBufAttr, &stMbPicCalResult);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("RK_MPI_CAL_VGS_GetPicBufferSize failed. err=0x%x", s32Ret);
return s32Ret;
}
RK_MPI_SYS_MmzFlushCache(g_pstVideoFrame.stVFrame.pMbBlk, RK_TRUE);
*pdata = RK_MPI_MB_Handle2VirAddr(g_pstVideoFrame.stVFrame.pMbBlk);
*data_len = stMbPicCalResult.u32MBSize;
return s32Ret;
}
static int sensor0_free_vpss_frame()
{
RK_S32 s32Ret = RK_SUCCESS;
s32Ret = RK_MPI_VPSS_ReleaseChnFrame(VpssGrp, VpssChn,&g_pstVideoFrame);
if (RK_SUCCESS!= s32Ret)
{
RK_LOGE("RK_MPI_VPSS_GetChnFrame fail s32Ret:%x",s32Ret);
return s32Ret;
}
return s32Ret;
}
static void *vpss_get_frame_loop0(void *arg)
{
int i = 1;
FILE *fp;
RK_S32 s32Ret = RK_SUCCESS;
PIC_BUF_ATTR_S stPicBufAttr;
MB_PIC_CAL_S stMbPicCalResult;
static int cnt = 0;
RK_LOGE("wzh vpss_get_frame_loop0");
void *data = NULL;
RK_U32 data_len = 0;
char yuv_name[64] = {0};
//printf("get vpss yuv
");
sprintf(yuv_name,"/tmp/sen%d.yuv",0);
while(!quit)
{
sensor0_get_yuv_frame(&data, &data_len);
//RK_LOGE("22vpss_get_frame_loop0 data_len:%d",data_len);
if (cnt++ >= 150) {
cnt = 0;
fp = fopen(yuv_name,"wb");
if (fp == NULL) {
RK_LOGE("Failed to open file %s", yuv_name);
return NULL;
}
fwrite(data, 1, data_len, fp);
fflush(fp);
fclose(fp);
printf("150 save yuv done
");
}
sensor0_free_vpss_frame();
//usleep(1000*100);
}
}
int sensor0_vpss_uninit()
{
RK_S32 s32Ret = RK_SUCCESS;
#if 1
s32Ret = RK_MPI_VPSS_StopGrp(VpssGrp);
if (s32Ret != RK_SUCCESS) {
return s32Ret;
}
for (RK_S32 i = 0; i < VPSS_MAX_CHN_NUM; i++) {
s32Ret = RK_MPI_VPSS_DisableChn(VpssGrp, VpssChn);
if (s32Ret != RK_SUCCESS) {
return s32Ret;
}
}
s32Ret = RK_MPI_VPSS_DestroyGrp(VpssGrp);
if (s32Ret != RK_SUCCESS) {
return s32Ret;
}
#endif
return s32Ret;
}
int sensor1_vpss_init(int vpss_width, int vpss_height)
{
VPSS_CROP_INFO_S stCropInfo;
RK_S32 s32Ret = RK_SUCCESS;
VPSS_GRP_ATTR_S stGrpVpssAttr;
VPSS_CHN_ATTR_S stVpssChnAttr;
MPP_CHN_S stViChn;
MPP_CHN_S stVpssChn;
stGrpVpssAttr.u32MaxW = vpss_width;
stGrpVpssAttr.u32MaxH = vpss_height;
stGrpVpssAttr.enPixelFormat = RK_FMT_YUV422_YUYV;
stGrpVpssAttr.enCompressMode = COMPRESS_MODE_NONE;
stGrpVpssAttr.stFrameRate.s32SrcFrameRate = -1;
stGrpVpssAttr.stFrameRate.s32DstFrameRate = -1;
s32Ret = RK_MPI_VPSS_CreateGrp(VpssGrp2, &stGrpVpssAttr);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_SetChnAttr fail s32Ret:%d",s32Ret);
return s32Ret;
}
if (pthread_mutex_init(&g_yuv_region.mutex, NULL) != 0)
{
printf("&yuv_region.mutex init fail
");
return 1;
}
memset(&stVpssChnAttr, 0, sizeof(VPSS_CHN_ATTR_S));
stVpssChnAttr.enChnMode = VPSS_CHN_MODE_USER;
stVpssChnAttr.u32Width = vpss_width;
stVpssChnAttr.u32Height = vpss_height;
stVpssChnAttr.enVideoFormat = VIDEO_FORMAT_LINEAR;
stVpssChnAttr.enPixelFormat = RK_FMT_RGB888;
stVpssChnAttr.enDynamicRange = DYNAMIC_RANGE_SDR8;
stVpssChnAttr.enCompressMode = COMPRESS_MODE_NONE;
stVpssChnAttr.stFrameRate.s32SrcFrameRate = -1;
stVpssChnAttr.stFrameRate.s32DstFrameRate = -1;
stVpssChnAttr.bMirror = RK_FALSE;
stVpssChnAttr.bFlip = RK_FALSE;
stVpssChnAttr.u32Depth = 5;
stVpssChnAttr.u32FrameBufCnt = 5;
s32Ret = RK_MPI_VPSS_SetChnAttr(VpssGrp2, VpssChn2, &stVpssChnAttr);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_SetChnAttr fail s32Ret:%d",s32Ret);
return s32Ret;
}
s32Ret = RK_MPI_VPSS_GetChnAttr(VpssGrp2, VpssChn2, &stVpssChnAttr);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_GetChnAttr fail s32Ret:%d",s32Ret);
return s32Ret;
}
s32Ret = RK_MPI_VPSS_EnableChn(VpssGrp2, VpssChn2);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_EnableChn fail s32Ret:%d",s32Ret);
return s32Ret;
}
s32Ret = RK_MPI_VPSS_StartGrp(VpssGrp2);
if (s32Ret != RK_SUCCESS)
{
RK_LOGE("RK_MPI_VPSS_StartGrp fail s32Ret:%d",s32Ret);
return s32Ret;
}
// bind vi to vpss
stViChn.enModId = RK_ID_VI;
stViChn.s32DevId = 1;
stViChn.s32ChnId = 0;
stVpssChn.enModId = RK_ID_VPSS;
stVpssChn.s32DevId = VpssGrp2;
stVpssChn.s32ChnId = VpssChn2;
RK_LOGE("vi to vpss ch %d vpss group %d", stVpssChn.s32ChnId , stVpssChn.s32DevId);
s32Ret = RK_MPI_SYS_Bind(&stViChn, &stVpssChn);
if (RK_SUCCESS!= s32Ret)
{
RK_LOGE("RK_MPI_SYS_Bind fail s32Ret:%d",s32Ret);
return s32Ret;
}
}
static int sensor1_get_yuv_frame(void **pdata, int *data_len)
{
int i = 1;
FILE *fp;
RK_S32 s32Ret = RK_SUCCESS;
PIC_BUF_ATTR_S stPicBufAttr;
MB_PIC_CAL_S stMbPicCalResult;
VPSS_GRP iVpssGrp = 0;
VPSS_CHN iVpssChn = VPSS_CHN0;
memset(&g_pstVideoFrame2,0,sizeof(VIDEO_FRAME_INFO_S));
//RK_LOGE("wzh get_yuv_frame");
s32Ret = RK_MPI_VPSS_GetChnFrame(VpssGrp, VpssChn, &g_pstVideoFrame2, -1);
if (RK_SUCCESS!= s32Ret)
{
RK_LOGE("RK_MPI_VPSS_GetChnFrame fail s32Ret:%x",s32Ret);
return s32Ret;
}
stPicBufAttr.u32Width = g_pstVideoFrame2.stVFrame.u32VirWidth;
stPicBufAttr.u32Height = g_pstVideoFrame2.stVFrame.u32VirHeight;
stPicBufAttr.enPixelFormat = g_pstVideoFrame2.stVFrame.enPixelFormat;
stPicBufAttr.enCompMode = g_pstVideoFrame2.stVFrame.enCompressMode;
s32Ret = RK_MPI_CAL_VGS_GetPicBufferSize(&stPicBufAttr, &stMbPicCalResult);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("RK_MPI_CAL_VGS_GetPicBufferSize failed. err=0x%x", s32Ret);
return s32Ret;
}
RK_MPI_SYS_MmzFlushCache(g_pstVideoFrame2.stVFrame.pMbBlk, RK_TRUE);
*pdata = RK_MPI_MB_Handle2VirAddr(g_pstVideoFrame2.stVFrame.pMbBlk);
*data_len = stMbPicCalResult.u32MBSize;
return s32Ret;
}
static int sensor1_free_vpss_frame()
{
RK_S32 s32Ret = RK_SUCCESS;
s32Ret = RK_MPI_VPSS_ReleaseChnFrame(VpssGrp2, VpssChn2,&g_pstVideoFrame2);
if (RK_SUCCESS!= s32Ret)
{
RK_LOGE("RK_MPI_VPSS_GetChnFrame fail s32Ret:%x",s32Ret);
return s32Ret;
}
return s32Ret;
}
static void *vpss_get_frame_loop1(void *arg)
{
int i = 1;
FILE *fp;
RK_S32 s32Ret = RK_SUCCESS;
PIC_BUF_ATTR_S stPicBufAttr;
MB_PIC_CAL_S stMbPicCalResult;
static int cnt = 0;
RK_LOGE("wzh vpss_get_frame_loop1");
void *data = NULL;
RK_U32 data_len = 0;
char yuv_name[64] = {0};
//printf("get vpss yuv
");
sprintf(yuv_name,"/tmp/sen%d.yuv",1);
while(!quit)
{
sensor1_get_yuv_frame(&data, &data_len);
//RK_LOGE("22vpss_get_frame_loop0 data_len:%d",data_len);
if (cnt++ >= 150) {
cnt = 0;
fp = fopen(yuv_name,"wb");
if (fp == NULL) {
RK_LOGE("Failed to open file %s", yuv_name);
return NULL;
}
fwrite(data, 1, data_len, fp);
fflush(fp);
fclose(fp);
printf("150 save yuv done
");
}
sensor1_free_vpss_frame();
//usleep(1000*100);
}
}
int sensor1_vpss_uninit()
{
RK_S32 s32Ret = RK_SUCCESS;
#if 1
s32Ret = RK_MPI_VPSS_StopGrp(VpssGrp2);
if (s32Ret != RK_SUCCESS) {
return s32Ret;
}
for (RK_S32 i = 0; i < VPSS_MAX_CHN_NUM; i++) {
s32Ret = RK_MPI_VPSS_DisableChn(VpssGrp2, VpssChn2);
if (s32Ret != RK_SUCCESS) {
return s32Ret;
}
}
s32Ret = RK_MPI_VPSS_DestroyGrp(VpssGrp2);
if (s32Ret != RK_SUCCESS) {
return s32Ret;
}
#endif
return s32Ret;
}
static void *GetMediaBuffer0(void *arg) {
printf("========%s========
", __func__);
int loopCount = 0;
int s32Ret;
RK_S32 waitTime = 10000;
int pipeId = 0;
int channelId = 1;
//channelId = *(int *)arg;
VIDEO_FRAME_INFO_S stViFrame;
VI_CHN_STATUS_S stChnStatus;
while (!quit) {
s32Ret = RK_MPI_VI_GetChnFrame(pipeId, channelId, &stViFrame, waitTime);
if (s32Ret == RK_SUCCESS) {
RK_U64 nowUs = TEST_COMM_GetNowUs();
void *data = RK_MPI_MB_Handle2VirAddr(stViFrame.stVFrame.pMbBlk);
RK_LOGD("RK_MPI_VI_GetChnFrame ok:data %p loop:%d seq:%d pts:%lld ms len=%llu",
data, loopCount, stViFrame.stVFrame.u32TimeRef,
stViFrame.stVFrame.u64PTS / 1000, stViFrame.stVFrame.u64PrivateData);
// 6.get the channel status
s32Ret = RK_MPI_VI_QueryChnStatus(pipeId, channelId, &stChnStatus);
RK_LOGD("RK_MPI_VI_QueryChnStatus ret %x, w:%d,h:%d,enable:%d,"
"current frame id:%d,input lost:%d,output lost:%d,"
"framerate:%d,vbfail:%d delay=%lldus",
s32Ret, stChnStatus.stSize.u32Width, stChnStatus.stSize.u32Height,
stChnStatus.bEnable, stChnStatus.u32CurFrameID,
stChnStatus.u32InputLostFrame, stChnStatus.u32OutputLostFrame,
stChnStatus.u32FrameRate, stChnStatus.u32VbFail,
nowUs - stViFrame.stVFrame.u64PTS);
// 7.release the frame
s32Ret = RK_MPI_VI_ReleaseChnFrame(pipeId, channelId, &stViFrame);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("RK_MPI_VI_ReleaseChnFrame fail %x", s32Ret);
}
loopCount++;
} else {
RK_LOGE("RK_MPI_VI_GetChnFrame timeout %x", s32Ret);
}
if ((g_s32FrameCnt >= 0) && (loopCount > g_s32FrameCnt)) {
quit = true;
break;
}
}
return NULL;
}
static void *GetMediaBuffer1(void *arg) {
printf("========%s========
", __func__);
int loopCount = 0;
int s32Ret;
RK_S32 waitTime = 10000;
int pipeId = 1;
int channelId = 1;
//channelId = *(int *)arg;
VIDEO_FRAME_INFO_S stViFrame;
VI_CHN_STATUS_S stChnStatus;
while (!quit) {
s32Ret = RK_MPI_VI_GetChnFrame(pipeId, channelId, &stViFrame, waitTime);
if (s32Ret == RK_SUCCESS) {
RK_U64 nowUs = TEST_COMM_GetNowUs();
void *data = RK_MPI_MB_Handle2VirAddr(stViFrame.stVFrame.pMbBlk);
RK_LOGD(
"RK_MPI_VI_GetChnFrame1 ok:data %p loop:%d seq:%d pts:%lld ms len=%llu",
data, loopCount, stViFrame.stVFrame.u32TimeRef,
stViFrame.stVFrame.u64PTS / 1000, stViFrame.stVFrame.u64PrivateData);
// 6.get the channel status
s32Ret = RK_MPI_VI_QueryChnStatus(pipeId, channelId, &stChnStatus);
RK_LOGD("RK_MPI_VI_QueryChnStatus1 ret %x, w:%d,h:%d,enable:%d,"
"current frame id:%d,input lost:%d,output lost:%d,"
"framerate:%d,vbfail:%d delay=%lldus",
s32Ret, stChnStatus.stSize.u32Width, stChnStatus.stSize.u32Height,
stChnStatus.bEnable, stChnStatus.u32CurFrameID,
stChnStatus.u32InputLostFrame, stChnStatus.u32OutputLostFrame,
stChnStatus.u32FrameRate, stChnStatus.u32VbFail,
nowUs - stViFrame.stVFrame.u64PTS);
// 7.release the frame
s32Ret = RK_MPI_VI_ReleaseChnFrame(pipeId, channelId, &stViFrame);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("RK_MPI_VI_ReleaseChnFrame fail %x", s32Ret);
}
loopCount++;
} else {
RK_LOGE("RK_MPI_VI_GetChnFrame1 timeout %x", s32Ret);
}
if ((g_s32FrameCnt >= 0) && (loopCount > g_s32FrameCnt)) {
quit = true;
break;
}
}
return NULL;
}
// demo板dev默认都是0,根据不同的channel 来选择不同的vi节点
int vi_dev_init0() {
printf("%s
", __func__);
int ret = 0;
int devId = 0;
int pipeId = devId;
VI_DEV_ATTR_S stDevAttr;
VI_DEV_BIND_PIPE_S stBindPipe;
memset(&stDevAttr, 0, sizeof(stDevAttr));
memset(&stBindPipe, 0, sizeof(stBindPipe));
// 0. get dev config status
ret = RK_MPI_VI_GetDevAttr(devId, &stDevAttr);
if (ret == RK_ERR_VI_NOT_CONFIG) {
// 0-1.config dev
ret = RK_MPI_VI_SetDevAttr(devId, &stDevAttr);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevAttr %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_SetDevAttr already
");
}
// 1.get dev enable status
ret = RK_MPI_VI_GetDevIsEnable(devId);
if (ret != RK_SUCCESS) {
// 1-2.enable dev
ret = RK_MPI_VI_EnableDev(devId);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_EnableDev %x
", ret);
return -1;
}
// 1-3.bind dev/pipe
stBindPipe.u32Num = pipeId;
stBindPipe.PipeId[0] = pipeId;
ret = RK_MPI_VI_SetDevBindPipe(devId, &stBindPipe);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevBindPipe %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_EnableDev already
");
}
return 0;
}
int vi_chn_init0(int channelId, int width, int height) {
int ret;
int buf_cnt = 2;
// VI init
VI_CHN_ATTR_S vi_chn_attr;
memset(&vi_chn_attr, 0, sizeof(vi_chn_attr));
vi_chn_attr.stIspOpt.u32BufCount = buf_cnt;
vi_chn_attr.stIspOpt.enMemoryType =
VI_V4L2_MEMORY_TYPE_DMABUF; // VI_V4L2_MEMORY_TYPE_MMAP;
vi_chn_attr.stSize.u32Width = width;
vi_chn_attr.stSize.u32Height = height;
vi_chn_attr.enPixelFormat = RK_FMT_YUV420SP;
vi_chn_attr.enCompressMode = COMPRESS_MODE_NONE; // COMPRESS_AFBC_16x16;
vi_chn_attr.u32Depth = 2;
ret = RK_MPI_VI_SetChnAttr(0, channelId, &vi_chn_attr);
ret |= RK_MPI_VI_EnableChn(0, channelId);
if (ret) {
printf("ERROR: create VI error! ret=%d
", ret);
return ret;
}
return ret;
}
int vi_dev_init1() {
printf("%s
", __func__);
int ret = 0;
int devId = 1;
int pipeId = devId;
VI_DEV_ATTR_S stDevAttr;
VI_DEV_BIND_PIPE_S stBindPipe;
memset(&stDevAttr, 0, sizeof(stDevAttr));
memset(&stBindPipe, 0, sizeof(stBindPipe));
// 0. get dev config status
ret = RK_MPI_VI_GetDevAttr(devId, &stDevAttr);
if (ret == RK_ERR_VI_NOT_CONFIG) {
// 0-1.config dev
ret = RK_MPI_VI_SetDevAttr(devId, &stDevAttr);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevAttr %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_SetDevAttr already
");
}
// 1.get dev enable status
ret = RK_MPI_VI_GetDevIsEnable(devId);
if (ret != RK_SUCCESS) {
// 1-2.enable dev
ret = RK_MPI_VI_EnableDev(devId);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_EnableDev %x
", ret);
return -1;
}
// 1-3.bind dev/pipe
stBindPipe.u32Num = pipeId;
stBindPipe.PipeId[0] = pipeId;
ret = RK_MPI_VI_SetDevBindPipe(devId, &stBindPipe);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevBindPipe %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_EnableDev already
");
}
return 0;
}
int vi_chn_init1(int channelId, int width, int height) {
int ret;
int buf_cnt = 2;
// VI init
VI_CHN_ATTR_S vi_chn_attr;
memset(&vi_chn_attr, 0, sizeof(vi_chn_attr));
vi_chn_attr.stIspOpt.u32BufCount = buf_cnt;
vi_chn_attr.stIspOpt.enMemoryType =
VI_V4L2_MEMORY_TYPE_DMABUF; // VI_V4L2_MEMORY_TYPE_MMAP;
vi_chn_attr.stSize.u32Width = width;
vi_chn_attr.stSize.u32Height = height;
vi_chn_attr.enPixelFormat = RK_FMT_YUV420SP;
vi_chn_attr.enCompressMode = COMPRESS_MODE_NONE; // COMPRESS_AFBC_16x16;
vi_chn_attr.u32Depth = 2;
ret = RK_MPI_VI_SetChnAttr(1, channelId, &vi_chn_attr);
ret |= RK_MPI_VI_EnableChn(1, channelId);
if (ret) {
printf("ERROR: create VI error! ret=%d
", ret);
return ret;
}
return ret;
}
static int isp_get_ldch_mesh_size(uint16_t *meshdata) {
int file_size = 0;
if (!meshdata) {
printf("meshdata is null
");
return -1;
}
unsigned short hpic, vpic, hsize, vsize, hstep, vstep = 0;
hpic = (unsigned short)meshdata[0];
vpic = (unsigned short)meshdata[1];
hsize = (unsigned short)meshdata[2];
vsize = (unsigned short)meshdata[3];
hstep = (unsigned short)meshdata[4];
vstep = (unsigned short)meshdata[5];
printf("----------lut info: [%d-%d-%d-%d-%d-%d]
", hpic, vpic, hsize, vsize, hstep,
vstep);
file_size = hsize * vsize * sizeof(unsigned short) + 12;
return file_size;
}
XCamReturn SIMPLE_COMM_ISP_CamGroup_setMeshToLdch(int CamGrpId, uint8_t SetLdchMode,
uint16_t **LdchMesh) {
XCamReturn ret = XCAM_RETURN_NO_ERROR;
rk_aiq_sys_ctx_t *aiq_ctx = NULL;
rk_aiq_camgroup_camInfos_t camInfos;
rk_aiq_ldch_v21_attrib_t ldchAttr;
memset(&camInfos, 0, sizeof(camInfos));
if (SetLdchMode != RK_GET_LDCH_BY_FILE && SetLdchMode != RK_GET_LDCH_BY_BUFF) {
printf("this Ldch mode:%d, if want to set ldch, 1: read file set ldch, 2: read "
"buff set ldch
",
SetLdchMode);
return -1;
}
if (rk_aiq_uapi2_camgroup_getCamInfos(g_aiq_camgroup_ctx[CamGrpId], &camInfos) ==
XCAM_RETURN_NO_ERROR) {
for (int i = 0; i < camInfos.valid_sns_num; i++) {
aiq_ctx = rk_aiq_uapi2_camgroup_getAiqCtxBySnsNm(g_aiq_camgroup_ctx[CamGrpId],
camInfos.sns_ent_nm[i]);
if (!aiq_ctx) {
printf("rk_aiq_uapi2_camgroup_getAiqCtxBySnsNm return aiq_ctx is Null
");
return -1;
}
printf("aiq_ctx sns name: %s, camPhyId %d
", camInfos.sns_ent_nm[i],
camInfos.sns_camPhyId[i]);
memset(&ldchAttr, 0, sizeof(rk_aiq_ldch_v21_attrib_t));
ret = rk_aiq_user_api2_aldch_v21_GetAttrib(aiq_ctx, &ldchAttr);
if (ret == XCAM_RETURN_NO_ERROR) {
if (SetLdchMode == RK_GET_LDCH_BY_BUFF) {
ldchAttr.update_lut_mode =
RK_AIQ_LDCH_UPDATE_LUT_FROM_EXTERNAL_BUFFER;
ldchAttr.en = true;
ldchAttr.lut.update_flag = true;
ldchAttr.lut.u.buffer.addr = LdchMesh[i];
ldchAttr.lut.u.buffer.size = isp_get_ldch_mesh_size(LdchMesh[i]);
} else {
char *pLastWord = NULL;
pLastWord = strrchr(LdchMesh[i], '/');
if (!pLastWord) {
printf("---- error !!! the: %s path isn't to be parsed!!!!
",
(char *)LdchMesh[i]);
return -1;
}
ldchAttr.en = true;
ldchAttr.lut.update_flag = true;
ldchAttr.update_lut_mode = RK_AIQ_LDCH_UPDATE_LUT_FROM_EXTERNAL_FILE;
memcpy(ldchAttr.lut.u.file.config_file_dir, (char *)LdchMesh[i],
(pLastWord - (char *)LdchMesh[i]) + 1);
sprintf(ldchAttr.lut.u.file.mesh_file_name, "%s", (pLastWord + 1));
printf("lut file_dir: %s, mesh_file: %s
",
ldchAttr.lut.u.file.config_file_dir,
ldchAttr.lut.u.file.mesh_file_name);
}
ret = rk_aiq_user_api2_aldch_v21_SetAttrib(aiq_ctx, &ldchAttr);
if (ret != XCAM_RETURN_NO_ERROR) {
printf("Failed to set ldch attrib : %d
", ret);
return ret;
}
}
}
}
return ret;
}
RK_S32 SIMPLE_COMM_ISP_CamGroup_Init(RK_S32 CamGroupId, rk_aiq_working_mode_t WDRMode,
bool MultiCam, int OpenLdch, void *LdchMesh[],
rk_aiq_camgroup_instance_cfg_t *pCamGroupCfg) {
int i, ret;
char sensor_name_array[MAX_AIQ_CTX][128];
rk_aiq_static_info_t aiq_static_info;
if (CamGroupId >= MAX_AIQ_CTX) {
printf("%s : CamId is over %d
", __FUNCTION__, MAX_AIQ_CTX);
return -1;
}
for (i = 0; i < pCamGroupCfg->sns_num; i++) {
ret = rk_aiq_uapi2_sysctl_enumStaticMetasByPhyId(i, &aiq_static_info);
if (ret != 0) {
printf("rk_aiq_uapi2_sysctl_enumStaticMetasByPhyId failure
");
return -1;
}
printf("CamGroupId:%d, cam_id: %d, sensor_name is %s, iqfiles is %s
",
CamGroupId, i, aiq_static_info.sensor_info.sensor_name,
pCamGroupCfg->config_file_dir);
memcpy(sensor_name_array[i], aiq_static_info.sensor_info.sensor_name,
strlen(aiq_static_info.sensor_info.sensor_name) + 1);
pCamGroupCfg->sns_ent_nm_array[i] = sensor_name_array[i];
printf("pCamGroupCfg->sns_ent_nm_array[%d] is %s
", i,
pCamGroupCfg->sns_ent_nm_array[i]);
ret = rk_aiq_uapi2_sysctl_preInit_devBufCnt(
aiq_static_info.sensor_info.sensor_name, "rkraw_rx", 2);
if (ret != 0) {
printf("rk_aiq_uapi2_sysctl_preInit_devBufCnt failure
");
return -1;
}
}
g_aiq_camgroup_ctx[CamGroupId] = rk_aiq_uapi2_camgroup_create(pCamGroupCfg);
if (!g_aiq_camgroup_ctx[CamGroupId]) {
printf("create camgroup ctx error!
");
return -1;
}
/* set LDCH must before <camgroup prepare>*/
if (OpenLdch) {
SIMPLE_COMM_ISP_CamGroup_setMeshToLdch(CamGroupId, OpenLdch, LdchMesh);
}
ret = rk_aiq_uapi2_camgroup_prepare(g_aiq_camgroup_ctx[CamGroupId], WDRMode);
ret |= rk_aiq_uapi2_camgroup_start(g_aiq_camgroup_ctx[CamGroupId]);
if (ret != 0) {
printf("rk_aiq_uapi2_camgroup_prepare / start failure
");
return -1;
}
printf("rk_aiq_uapi2_camgroup_start over
");
return ret;
}
RK_S32 SIMPLE_COMM_ISP_CamGroup_Stop(RK_S32 CamGroupId) {
if (CamGroupId >= MAX_AIQ_CTX || !g_aiq_camgroup_ctx[CamGroupId]) {
printf("%s : CamId is over 3 or not init
", __FUNCTION__);
return -1;
}
printf("rk_aiq_uapi2_camgroup_stop enter
");
rk_aiq_uapi2_camgroup_stop(g_aiq_camgroup_ctx[CamGroupId]);
printf("rk_aiq_uapi2_camgroup_destroy enter
");
rk_aiq_uapi2_camgroup_destroy(g_aiq_camgroup_ctx[CamGroupId]);
printf("rk_aiq_uapi2_camgroup_destroy exit
");
g_aiq_camgroup_ctx[CamGroupId] = NULL;
return 0;
}
static RK_CHAR optstr[] = "?::a::w:h:c:I:o:m:d:";
static void print_usage(const RK_CHAR *name) {
printf("usage example:
");
printf(" %s -I 0 -w 1920 -h 1080 -o 1
", name);
printf(" -a | --aiq: iq file path, Default:/etc/iqfiles
");
printf(" -w | --width: VI width, Default:1920
");
printf(" -h | --heght: VI height, Default:1080
");
printf(" -c | --frame_cnt: frame number of output, Default:-1
");
printf(" -I | --camid: camera ctx id, Default 0. "
"0:rkisp_mainpath,1:rkisp_selfpath,2:rkisp_bypasspath
");
printf(" -d | --hdr_mode: Default:0, 0:normal,1:hdr2
");
printf(" -m | --multiple sensor: Default:0
");
printf(" -o: output path, Default:0 0 or 1 /data/test_0.yuv
");
}
/******************************************************************************
* function : venc thread
******************************************************************************/
static void *venc0_get_stream(void *pArgs) {
printf("#Start %s , arg:%p
", __func__, pArgs);
SAMPLE_VENC_CTX_S *ctx = (SAMPLE_VENC_CTX_S *)(pArgs);
RK_S32 s32Ret = RK_FAILURE;
// char name[256] = {0};
// FILE *fp = RK_NULL;
void *pData = RK_NULL;
RK_S32 loopCount = 0;
while (!quit) {
s32Ret = SAMPLE_COMM_VENC_GetStream(ctx, &pData);
if (s32Ret == RK_SUCCESS) {
RK_LOGD("chn:%d, loopCount:%d wd:%d
", ctx->s32ChnId, loopCount,
ctx->stFrame.pstPack->u32Len);
// exit when complete
if (ctx->s32loopCount > 0) {
if (loopCount >= ctx->s32loopCount) {
SAMPLE_COMM_VENC_ReleaseStream(ctx);
quit = true;
break;
}
}
PrintStreamDetails(ctx->s32ChnId, ctx->stFrame.pstPack->u32Len);
pthread_mutex_lock(&g_rtsp_mutex);
rtsp_tx_video(g_rtsp_session_0, pData, ctx->stFrame.pstPack->u32Len,
ctx->stFrame.pstPack->u64PTS);
rtsp_do_event(g_rtsplive);
pthread_mutex_unlock(&g_rtsp_mutex);
SAMPLE_COMM_VENC_ReleaseStream(ctx);
loopCount++;
}
usleep(1000);
}
return RK_NULL;
}
static void *venc1_get_stream(void *pArgs) {
printf("#Start %s , arg:%p
", __func__, pArgs);
SAMPLE_VENC_CTX_S *ctx = (SAMPLE_VENC_CTX_S *)(pArgs);
RK_S32 s32Ret = RK_FAILURE;
// char name[256] = {0};
// FILE *fp = RK_NULL;
void *pData = RK_NULL;
RK_S32 loopCount = 0;
while (!quit) {
s32Ret = SAMPLE_COMM_VENC_GetStream(ctx, &pData);
if (s32Ret == RK_SUCCESS) {
RK_LOGD("chn:%d, loopCount:%d wd:%d
", ctx->s32ChnId, loopCount,
ctx->stFrame.pstPack->u32Len);
// exit when complete
if (ctx->s32loopCount > 0) {
if (loopCount >= ctx->s32loopCount) {
SAMPLE_COMM_VENC_ReleaseStream(ctx);
quit = true;
break;
}
}
PrintStreamDetails(ctx->s32ChnId, ctx->stFrame.pstPack->u32Len);
pthread_mutex_lock(&g_rtsp_mutex);
rtsp_tx_video(g_rtsp_session_1, pData, ctx->stFrame.pstPack->u32Len,
ctx->stFrame.pstPack->u64PTS);
rtsp_do_event(g_rtsplive);
pthread_mutex_unlock(&g_rtsp_mutex);
SAMPLE_COMM_VENC_ReleaseStream(ctx);
loopCount++;
}
usleep(1000);
}
return RK_NULL;
}
void handle_pipe(int sig) { printf("%s sig = %d
", __func__, sig); }
int main(int argc, char *argv[]) {
RK_S32 s32Ret = RK_FAILURE;
RK_U32 u32Width = 1920;
RK_U32 u32Height = 1080;
RK_U32 subu32Width = 320;
RK_U32 subu32Height = 180;
int savefile = 0;
RK_S32 s32chnlId = 1;
int c;
char *iq_dir = NULL;
//RK_S32 s32CamNum = 2;
VI_SAVE_FILE_INFO_S stDebugFile;
#if 0 //def RKAIQ_GRP
int hdr = 0;
int multi_sensor = RK_FALSE;
#endif
SAMPLE_MPI_CTX_S *ctx;
int cam_0_fps = 30;
int cam_0_enable_hdr = 0;
int cam_0_video_0_width = 1920;
int cam_0_video_0_height = 1080;
int cam_0_video_1_width = 320;
int cam_0_video_1_height = 180;
// int cam_0_video_2_width = 896;
// int cam_0_video_2_height = 512;
int cam_1_fps = 30;
int cam_1_enable_hdr = 0;
int cam_1_video_0_width = 1920;
int cam_1_video_0_height = 1080;
int cam_1_video_1_width = 320;
int cam_1_video_1_height = 180;
int enable_npu = 1;
int enable_buf_share = 1;
CODEC_TYPE_E enCodecType = RK_CODEC_TYPE_H265;
VENC_RC_MODE_E enRcMode = VENC_RC_MODE_H265CBR;
RK_CHAR *pCodecName = "H265";
RK_S32 s32CamId = -1;
MPP_CHN_S vi_chn[6], venc_chn[4];
RK_CHAR *pOutPathVenc = "/userdata";
RK_S32 s32CamNum = 4;
RK_S32 s32loopCnt = -1;
RK_S32 s32BitRate = 2 * 1024;
RK_S32 i;
struct sigaction action;
action.sa_handler = handle_pipe;
sigemptyset(&action.sa_mask);
action.sa_flags = 0;
sigaction(SIGPIPE, &action, NULL);
ctx = (SAMPLE_MPI_CTX_S *)(malloc(sizeof(SAMPLE_MPI_CTX_S)));
memset(ctx, 0, sizeof(SAMPLE_MPI_CTX_S));
signal(SIGINT, sigterm_handler);
while ((c = getopt(argc, argv, optstr)) != -1) {
switch (c) {
case 'a':
if (optarg)
iq_dir = optarg;
else
iq_dir = "/etc/iqfiles";
break;
case 'w':
u32Width = atoi(optarg);
break;
case 'h':
u32Height = atoi(optarg);
break;
case 'I':
s32chnlId = atoi(optarg);
break;
case 'c':
g_s32FrameCnt = atoi(optarg);
break;
case 'o':
savefile = atoi(optarg);
break;
#if 0//def RKAIQ_GRP
case 'd':
hdr = atoi(optarg);
break;
case 'm':
multi_sensor = atoi(optarg);
break;
#endif
case '?':
default:
print_usage(argv[0]);
return 0;
}
}
if (iq_dir) {
#if 0 //def RKAIQ_GRP
printf("#####Aiq xml dirpath: %s
", iq_dir);
rk_aiq_working_mode_t hdr_mode = RK_AIQ_WORKING_MODE_NORMAL;
if (hdr == 1)
hdr_mode = RK_AIQ_WORKING_MODE_ISP_HDR2;
rk_aiq_camgroup_instance_cfg_t camgroup_cfg;
memset(&camgroup_cfg, 0, sizeof(camgroup_cfg));
camgroup_cfg.sns_num = s32CamNum;
camgroup_cfg.config_file_dir = iq_dir;
s32Ret = SIMPLE_COMM_ISP_CamGroup_Init(0, hdr_mode, multi_sensor, 0,
RK_NULL, &camgroup_cfg);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("SIMPLE_COMM_ISP_CamGroup_Init failure:%#X", s32Ret);
return RK_FAILURE;
}
#else //RKAIQ
RK_BOOL bMultictx = RK_TRUE;
printf("#Rkaiq XML DirPath: %s
", iq_dir);
printf("#bMultictx: %d
", bMultictx);
rk_aiq_working_mode_t hdr_mode_0 = RK_AIQ_WORKING_MODE_NORMAL;
rk_aiq_working_mode_t hdr_mode_1 = RK_AIQ_WORKING_MODE_NORMAL;
if (cam_0_enable_hdr)
hdr_mode_0 = RK_AIQ_WORKING_MODE_ISP_HDR2;
if (cam_1_enable_hdr)
hdr_mode_1 = RK_AIQ_WORKING_MODE_ISP_HDR2;
SAMPLE_COMM_ISP_Init(0, hdr_mode_0, bMultictx, iq_dir);
SAMPLE_COMM_ISP_Run(0);
SAMPLE_COMM_ISP_SetFrameRate(0, cam_0_fps);
SAMPLE_COMM_ISP_Init(1, hdr_mode_1, bMultictx, iq_dir);
SAMPLE_COMM_ISP_Run(1);
SAMPLE_COMM_ISP_SetFrameRate(1, cam_1_fps);
#endif
}
printf("88#Resolution: %dx%d
", u32Width, u32Height);
printf("#Output Path: %d
", savefile);
printf("#CameraIdx: %d
", s32chnlId);
printf("#Frame Count to save: %d
", g_s32FrameCnt);
// init rtsp
g_rtsplive = create_rtsp_demo(554);
g_rtsp_session_0 = rtsp_new_session(g_rtsplive, "/live/0");
g_rtsp_session_1 = rtsp_new_session(g_rtsplive, "/live/1");
//g_rtsp_session_2 = rtsp_new_session(g_rtsplive, "/live/2");
//g_rtsp_session_3 = rtsp_new_session(g_rtsplive, "/live/3");
rtsp_set_video(g_rtsp_session_0, RTSP_CODEC_ID_VIDEO_H265, NULL, 0);
rtsp_set_video(g_rtsp_session_1, RTSP_CODEC_ID_VIDEO_H265, NULL, 0);
//rtsp_set_video(g_rtsp_session_2, RTSP_CODEC_ID_VIDEO_H265, NULL, 0);
//rtsp_set_video(g_rtsp_session_3, RTSP_CODEC_ID_VIDEO_H265, NULL, 0);
rtsp_sync_video_ts(g_rtsp_session_0, rtsp_get_reltime(), rtsp_get_ntptime());
rtsp_sync_video_ts(g_rtsp_session_1, rtsp_get_reltime(), rtsp_get_ntptime());
//rtsp_sync_video_ts(g_rtsp_session_2, rtsp_get_reltime(), rtsp_get_ntptime());
//rtsp_sync_video_ts(g_rtsp_session_3, rtsp_get_reltime(), rtsp_get_ntptime());
if (RK_MPI_SYS_Init() != RK_SUCCESS) {
RK_LOGE("rk mpi sys init fail!");
goto __FAILED;
}
#if 0
vi_dev_init0();
vi_chn_init0(s32chnlId, subu32Width, subu32Height);
vi_dev_init1();
vi_chn_init1(s32chnlId, subu32Width, subu32Height);
#endif
for (i = 0; i < s32CamNum; i++) {
if (i == 0) {
ctx->vi[i].u32Width = cam_0_video_1_width;
ctx->vi[i].u32Height = cam_0_video_1_height;
}
if (i == 1) {
ctx->vi[i].u32Width = cam_0_video_0_width;
ctx->vi[i].u32Height = cam_0_video_0_height;
}
if (i == 2) {
ctx->vi[i].u32Width = cam_1_video_1_width;
ctx->vi[i].u32Height = cam_1_video_1_height;
}
if (i == 3) {
ctx->vi[i].u32Width = cam_1_video_0_width;
ctx->vi[i].u32Height = cam_1_video_0_height;
}
if (i < 2) {
ctx->vi[i].s32DevId = 0;
ctx->vi[i].u32PipeId = 0;
ctx->vi[i].s32ChnId = i;
} else {
ctx->vi[i].s32DevId = 1;
ctx->vi[i].u32PipeId = 1;
ctx->vi[i].s32ChnId = i - 2;
}
ctx->vi[i].stChnAttr.stIspOpt.u32BufCount = 2;
ctx->vi[i].stChnAttr.stIspOpt.enMemoryType = VI_V4L2_MEMORY_TYPE_DMABUF;
ctx->vi[i].stChnAttr.u32Depth = 0;
ctx->vi[i].stChnAttr.enPixelFormat = RK_FMT_YUV420SP;
ctx->vi[i].stChnAttr.enCompressMode = COMPRESS_MODE_NONE;
ctx->vi[i].stChnAttr.stFrameRate.s32SrcFrameRate = -1;
ctx->vi[i].stChnAttr.stFrameRate.s32DstFrameRate = -1;
SAMPLE_COMM_VI_CreateChn(&ctx->vi[i]);
vi_chn[i].enModId = RK_ID_VI;
vi_chn[i].s32DevId = ctx->vi[i].s32DevId;
vi_chn[i].s32ChnId = ctx->vi[i].s32ChnId;
ctx->venc[i].s32ChnId = i;
if (i == 0) {
ctx->venc[i].u32Width = cam_0_video_1_width;
ctx->venc[i].u32Height = cam_0_video_1_height;
ctx->venc[i].stChnAttr.stVencAttr.u32BufSize =
cam_0_video_1_width * cam_0_video_1_height / 4;
ctx->venc[i].u32Fps = cam_0_fps;
}
if (i == 1) {
ctx->venc[i].u32Width = cam_0_video_0_width;
ctx->venc[i].u32Height = cam_0_video_0_height;
ctx->venc[i].stChnAttr.stVencAttr.u32BufSize =
cam_0_video_0_width * cam_0_video_0_height / 4;
ctx->venc[i].u32Fps = cam_0_fps;
}
if (i == 2) {
ctx->venc[i].u32Width = cam_1_video_1_width;
ctx->venc[i].u32Height = cam_1_video_1_height;
ctx->venc[i].stChnAttr.stVencAttr.u32BufSize =
cam_1_video_1_width * cam_1_video_1_height / 4;
ctx->venc[i].u32Fps = cam_1_fps;
}
if (i == 3) {
ctx->venc[i].u32Width = cam_1_video_0_width;
ctx->venc[i].u32Height = cam_1_video_0_height;
ctx->venc[i].stChnAttr.stVencAttr.u32BufSize =
cam_1_video_0_width * cam_1_video_0_height / 4;
ctx->venc[i].u32Fps = cam_1_fps;
}
ctx->venc[i].u32Gop = 60;
ctx->venc[i].u32BitRate = s32BitRate;
ctx->venc[i].enCodecType = enCodecType;
ctx->venc[i].enRcMode = enRcMode;
if (i == 1)
ctx->venc[i].getStreamCbFunc = venc0_get_stream;
if (i == 3)
ctx->venc[i].getStreamCbFunc = venc1_get_stream;
ctx->venc[i].s32loopCount = s32loopCnt;
ctx->venc[i].dstFilePath = pOutPathVenc;
// H264 66:Baseline 77:Main Profile 100:High Profile
// H265 0:Main Profile 1:Main 10 Profile
// MJPEG 0:Baseline
ctx->venc[i].stChnAttr.stVencAttr.u32Profile = 0;
ctx->venc[i].stChnAttr.stGopAttr.enGopMode = VENC_GOPMODE_NORMALP;
ctx->venc[i].enable_buf_share = enable_buf_share;
if ((i == 1) || (i == 3)) {
SAMPLE_COMM_VENC_CreateChn(&ctx->venc[i]);
}
printf("venc[%d]:u32BufSize:%d
", i,
ctx->venc[i].stChnAttr.stVencAttr.u32BufSize);
venc_chn[i].enModId = RK_ID_VENC;
venc_chn[i].s32DevId = 0;
venc_chn[i].s32ChnId = ctx->venc[i].s32ChnId;
}
SAMPLE_COMM_Bind(&vi_chn[1], &venc_chn[1]);
SAMPLE_COMM_Bind(&vi_chn[3], &venc_chn[3]);
#if 0
stDebugFile.bCfg = (RK_BOOL)savefile;
// memcpy(stDebugFile.aFilePath, "/userdata/", strlen("/data"));
strcpy(stDebugFile.aFilePath, "/userdata/");
snprintf(stDebugFile.aFileName, sizeof(stDebugFile.aFileName), "test0_%d.yuv",
s32chnlId);
RK_MPI_VI_ChnSaveFile(0, s32chnlId, &stDebugFile);
snprintf(stDebugFile.aFileName, sizeof(stDebugFile.aFileName), "test1_%d.yuv",
s32chnlId);
RK_MPI_VI_ChnSaveFile(1, s32chnlId, &stDebugFile);
RK_MPI_VI_StartPipe(0);
RK_MPI_VI_StartPipe(1);
#endif
sensor0_vpss_init(320, 180);
sensor1_vpss_init(320, 180);
#if 0
printf("-----------------------------------wzh 1-------------------------------------------
");
pthread_t main_thread, sub_thread;
pthread_create(&main_thread, NULL, vpss_get_frame_loop0, &s32chnlId);
pthread_create(&sub_thread, NULL, vpss_get_frame_loop1, &s32chnlId);
#endif
while (!quit) {
usleep(50000);
}
#if 0
pthread_join(main_thread, NULL);
pthread_join(sub_thread, NULL);
#endif
for (i = 0; i < s32CamNum; i++) {
if (ctx->venc[i].getStreamCbFunc) {
pthread_join(ctx->venc[i].getStreamThread, NULL);
}
}
if (g_rtsplive)
rtsp_del_demo(g_rtsplive);
SAMPLE_COMM_UnBind(&vi_chn[1], &venc_chn[1]);
SAMPLE_COMM_UnBind(&vi_chn[3], &venc_chn[3]);
sensor0_vpss_uninit();
sensor1_vpss_uninit();
// Destroy VI[0]
for (i = 0; i < s32CamNum; i++) {
if ((i == 1) || (i == 3)) {
SAMPLE_COMM_VENC_DestroyChn(&ctx->venc[i]);
}
SAMPLE_COMM_VI_DestroyChn(&ctx->vi[i]);
}
s32Ret = RK_MPI_VI_DisableChn(0, s32chnlId);
s32Ret = RK_MPI_VI_DisableChn(1, s32chnlId);
RK_LOGE("RK_MPI_VI_DisableChn %x", s32Ret);
s32Ret = RK_MPI_VI_DisableDev(0);
s32Ret = RK_MPI_VI_DisableDev(1);
RK_LOGE("RK_MPI_VI_DisableDev %x", s32Ret);
#if 0 // def RKAIQ_GRP
SIMPLE_COMM_ISP_CamGroup_Stop(0);
#endif
if (iq_dir) {
#ifdef RKAIQ
for (int i = 0; i < s32CamNum; i++) {
SAMPLE_COMM_ISP_Stop(i);
}
#endif
}
__FAILED:
RK_LOGE("test running exit:%d", s32Ret);
RK_MPI_SYS_Exit();
if (ctx) {
free(ctx);
ctx = RK_NULL;
}
return 0;
}
#endif23、双目取YUV流demo
//双目取流RKAIQ_GRP
#if 0
#include <errno.h>
#include <pthread.h>
#include <signal.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/poll.h>
#include <time.h>
#include <unistd.h>
#ifdef RV1126_RV1109
#include <rk_aiq_user_api_camgroup.h>
#include <rk_aiq_user_api_imgproc.h>
#include <rk_aiq_user_api_sysctl.h>
#else
#include <rk_aiq_user_api2_camgroup.h>
#include <rk_aiq_user_api2_imgproc.h>
#include <rk_aiq_user_api2_sysctl.h>
#endif
#include "rk_debug.h"
#include "rk_defines.h"
#include "rk_mpi_adec.h"
#include "rk_mpi_aenc.h"
#include "rk_mpi_ai.h"
#include "rk_mpi_ao.h"
#include "rk_mpi_avs.h"
#include "rk_mpi_cal.h"
#include "rk_mpi_ivs.h"
#include "rk_mpi_mb.h"
#include "rk_mpi_rgn.h"
#include "rk_mpi_sys.h"
#include "rk_mpi_tde.h"
#include "rk_mpi_vdec.h"
#include "rk_mpi_venc.h"
#include "rk_mpi_vi.h"
#include "rk_mpi_vo.h"
#include "rk_mpi_vpss.h"
static RK_S32 g_s32FrameCnt = -1;
static bool quit = false;
#define RKAIQ_GRP
#define MAX_AIQ_CTX 8
static rk_aiq_sys_ctx_t *g_aiq_ctx[MAX_AIQ_CTX];
static rk_aiq_camgroup_ctx_t *g_aiq_camgroup_ctx[MAX_AIQ_CTX];
rk_aiq_working_mode_t g_WDRMode[MAX_AIQ_CTX];
#include <stdatomic.h>
static atomic_int g_sof_cnt = 0;
static atomic_bool g_should_quit = false;
RK_S32 g_devBufCnt[MAX_AIQ_CTX] = {2, 2, 2, 2, 2, 2, 2, 2};
typedef enum rk_GET_LDCH_MODE_E {
RK_NONE_LDCH = 0,
RK_GET_LDCH_BY_FILE,
RK_GET_LDCH_BY_BUFF
} GET_LDCH_MODE_E;
static void sigterm_handler(int sig) {
fprintf(stderr, "signal %d
", sig);
quit = true;
}
RK_U64 TEST_COMM_GetNowUs() {
struct timespec time = {0, 0};
clock_gettime(CLOCK_MONOTONIC, &time);
return (RK_U64)time.tv_sec * 1000000 + (RK_U64)time.tv_nsec / 1000; /* microseconds */
}
static void *GetMediaBuffer0(void *arg) {
printf("========%s========
", __func__);
int loopCount = 0;
int s32Ret;
RK_S32 waitTime = 10000;
int pipeId = 0;
int channelId = 0;
channelId = *(int *)arg;
VIDEO_FRAME_INFO_S stViFrame;
VI_CHN_STATUS_S stChnStatus;
while (!quit) {
s32Ret = RK_MPI_VI_GetChnFrame(pipeId, channelId, &stViFrame, waitTime);
if (s32Ret == RK_SUCCESS) {
RK_U64 nowUs = TEST_COMM_GetNowUs();
void *data = RK_MPI_MB_Handle2VirAddr(stViFrame.stVFrame.pMbBlk);
RK_LOGD(
"RK_MPI_VI_GetChnFrame ok:data %p loop:%d seq:%d pts:%lld ms len=%llu",
data, loopCount, stViFrame.stVFrame.u32TimeRef,
stViFrame.stVFrame.u64PTS / 1000, stViFrame.stVFrame.u64PrivateData);
// 6.get the channel status
s32Ret = RK_MPI_VI_QueryChnStatus(pipeId, channelId, &stChnStatus);
RK_LOGD("RK_MPI_VI_QueryChnStatus ret %x, w:%d,h:%d,enable:%d,"
"current frame id:%d,input lost:%d,output lost:%d,"
"framerate:%d,vbfail:%d delay=%lldus",
s32Ret, stChnStatus.stSize.u32Width, stChnStatus.stSize.u32Height,
stChnStatus.bEnable, stChnStatus.u32CurFrameID,
stChnStatus.u32InputLostFrame, stChnStatus.u32OutputLostFrame,
stChnStatus.u32FrameRate, stChnStatus.u32VbFail,
nowUs - stViFrame.stVFrame.u64PTS);
// 7.release the frame
s32Ret = RK_MPI_VI_ReleaseChnFrame(pipeId, channelId, &stViFrame);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("RK_MPI_VI_ReleaseChnFrame fail %x", s32Ret);
}
loopCount++;
} else {
RK_LOGE("RK_MPI_VI_GetChnFrame timeout %x", s32Ret);
}
if ((g_s32FrameCnt >= 0) && (loopCount > g_s32FrameCnt)) {
quit = true;
break;
}
}
return NULL;
}
static void *GetMediaBuffer1(void *arg) {
printf("========%s========
", __func__);
int loopCount = 0;
int s32Ret;
RK_S32 waitTime = 10000;
int pipeId = 1;
int channelId = 0;
channelId = *(int *)arg;
VIDEO_FRAME_INFO_S stViFrame;
VI_CHN_STATUS_S stChnStatus;
while (!quit) {
s32Ret = RK_MPI_VI_GetChnFrame(pipeId, channelId, &stViFrame, waitTime);
if (s32Ret == RK_SUCCESS) {
RK_U64 nowUs = TEST_COMM_GetNowUs();
void *data = RK_MPI_MB_Handle2VirAddr(stViFrame.stVFrame.pMbBlk);
RK_LOGD(
"RK_MPI_VI_GetChnFrame1 ok:data %p loop:%d seq:%d pts:%lld ms len=%llu",
data, loopCount, stViFrame.stVFrame.u32TimeRef,
stViFrame.stVFrame.u64PTS / 1000, stViFrame.stVFrame.u64PrivateData);
// 6.get the channel status
s32Ret = RK_MPI_VI_QueryChnStatus(pipeId, channelId, &stChnStatus);
RK_LOGD("RK_MPI_VI_QueryChnStatus1 ret %x, w:%d,h:%d,enable:%d,"
"current frame id:%d,input lost:%d,output lost:%d,"
"framerate:%d,vbfail:%d delay=%lldus",
s32Ret, stChnStatus.stSize.u32Width, stChnStatus.stSize.u32Height,
stChnStatus.bEnable, stChnStatus.u32CurFrameID,
stChnStatus.u32InputLostFrame, stChnStatus.u32OutputLostFrame,
stChnStatus.u32FrameRate, stChnStatus.u32VbFail,
nowUs - stViFrame.stVFrame.u64PTS);
// 7.release the frame
s32Ret = RK_MPI_VI_ReleaseChnFrame(pipeId, channelId, &stViFrame);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("RK_MPI_VI_ReleaseChnFrame fail %x", s32Ret);
}
loopCount++;
} else {
RK_LOGE("RK_MPI_VI_GetChnFrame1 timeout %x", s32Ret);
}
if ((g_s32FrameCnt >= 0) && (loopCount > g_s32FrameCnt)) {
quit = true;
break;
}
}
return NULL;
}
// demo板dev默认都是0,根据不同的channel 来选择不同的vi节点
int vi_dev_init0() {
printf("%s
", __func__);
int ret = 0;
int devId = 0;
int pipeId = devId;
VI_DEV_ATTR_S stDevAttr;
VI_DEV_BIND_PIPE_S stBindPipe;
memset(&stDevAttr, 0, sizeof(stDevAttr));
memset(&stBindPipe, 0, sizeof(stBindPipe));
// 0. get dev config status
ret = RK_MPI_VI_GetDevAttr(devId, &stDevAttr);
if (ret == RK_ERR_VI_NOT_CONFIG) {
// 0-1.config dev
ret = RK_MPI_VI_SetDevAttr(devId, &stDevAttr);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevAttr %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_SetDevAttr already
");
}
// 1.get dev enable status
ret = RK_MPI_VI_GetDevIsEnable(devId);
if (ret != RK_SUCCESS) {
// 1-2.enable dev
ret = RK_MPI_VI_EnableDev(devId);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_EnableDev %x
", ret);
return -1;
}
// 1-3.bind dev/pipe
stBindPipe.u32Num = pipeId;
stBindPipe.PipeId[0] = pipeId;
ret = RK_MPI_VI_SetDevBindPipe(devId, &stBindPipe);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevBindPipe %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_EnableDev already
");
}
return 0;
}
int vi_chn_init0(int channelId, int width, int height) {
int ret;
int buf_cnt = 2;
// VI init
VI_CHN_ATTR_S vi_chn_attr;
memset(&vi_chn_attr, 0, sizeof(vi_chn_attr));
vi_chn_attr.stIspOpt.u32BufCount = buf_cnt;
vi_chn_attr.stIspOpt.enMemoryType =
VI_V4L2_MEMORY_TYPE_DMABUF; // VI_V4L2_MEMORY_TYPE_MMAP;
vi_chn_attr.stSize.u32Width = width;
vi_chn_attr.stSize.u32Height = height;
vi_chn_attr.enPixelFormat = RK_FMT_YUV420SP;
vi_chn_attr.enCompressMode = COMPRESS_MODE_NONE; // COMPRESS_AFBC_16x16;
vi_chn_attr.u32Depth = 2;
ret = RK_MPI_VI_SetChnAttr(0, channelId, &vi_chn_attr);
ret |= RK_MPI_VI_EnableChn(0, channelId);
if (ret) {
printf("ERROR: create VI error! ret=%d
", ret);
return ret;
}
return ret;
}
int vi_dev_init1() {
printf("%s
", __func__);
int ret = 0;
int devId = 1;
int pipeId = devId;
VI_DEV_ATTR_S stDevAttr;
VI_DEV_BIND_PIPE_S stBindPipe;
memset(&stDevAttr, 0, sizeof(stDevAttr));
memset(&stBindPipe, 0, sizeof(stBindPipe));
// 0. get dev config status
ret = RK_MPI_VI_GetDevAttr(devId, &stDevAttr);
if (ret == RK_ERR_VI_NOT_CONFIG) {
// 0-1.config dev
ret = RK_MPI_VI_SetDevAttr(devId, &stDevAttr);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevAttr %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_SetDevAttr already
");
}
// 1.get dev enable status
ret = RK_MPI_VI_GetDevIsEnable(devId);
if (ret != RK_SUCCESS) {
// 1-2.enable dev
ret = RK_MPI_VI_EnableDev(devId);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_EnableDev %x
", ret);
return -1;
}
// 1-3.bind dev/pipe
stBindPipe.u32Num = pipeId;
stBindPipe.PipeId[0] = pipeId;
ret = RK_MPI_VI_SetDevBindPipe(devId, &stBindPipe);
if (ret != RK_SUCCESS) {
printf("RK_MPI_VI_SetDevBindPipe %x
", ret);
return -1;
}
} else {
printf("RK_MPI_VI_EnableDev already
");
}
return 0;
}
int vi_chn_init1(int channelId, int width, int height) {
int ret;
int buf_cnt = 2;
// VI init
VI_CHN_ATTR_S vi_chn_attr;
memset(&vi_chn_attr, 0, sizeof(vi_chn_attr));
vi_chn_attr.stIspOpt.u32BufCount = buf_cnt;
vi_chn_attr.stIspOpt.enMemoryType =
VI_V4L2_MEMORY_TYPE_DMABUF; // VI_V4L2_MEMORY_TYPE_MMAP;
vi_chn_attr.stSize.u32Width = width;
vi_chn_attr.stSize.u32Height = height;
vi_chn_attr.enPixelFormat = RK_FMT_YUV420SP;
vi_chn_attr.enCompressMode = COMPRESS_MODE_NONE; // COMPRESS_AFBC_16x16;
vi_chn_attr.u32Depth = 2;
ret = RK_MPI_VI_SetChnAttr(1, channelId, &vi_chn_attr);
ret |= RK_MPI_VI_EnableChn(1, channelId);
if (ret) {
printf("ERROR: create VI error! ret=%d
", ret);
return ret;
}
return ret;
}
static int isp_get_ldch_mesh_size(uint16_t *meshdata) {
int file_size = 0;
if (!meshdata) {
printf("meshdata is null
");
return -1;
}
unsigned short hpic, vpic, hsize, vsize, hstep, vstep = 0;
hpic = (unsigned short)meshdata[0];
vpic = (unsigned short)meshdata[1];
hsize = (unsigned short)meshdata[2];
vsize = (unsigned short)meshdata[3];
hstep = (unsigned short)meshdata[4];
vstep = (unsigned short)meshdata[5];
printf("----------lut info: [%d-%d-%d-%d-%d-%d]
", hpic, vpic, hsize, vsize, hstep,
vstep);
file_size = hsize * vsize * sizeof(unsigned short) + 12;
return file_size;
}
XCamReturn SIMPLE_COMM_ISP_CamGroup_setMeshToLdch(int CamGrpId, uint8_t SetLdchMode,
uint16_t **LdchMesh) {
XCamReturn ret = XCAM_RETURN_NO_ERROR;
rk_aiq_sys_ctx_t *aiq_ctx = NULL;
rk_aiq_camgroup_camInfos_t camInfos;
rk_aiq_ldch_v21_attrib_t ldchAttr;
memset(&camInfos, 0, sizeof(camInfos));
if (SetLdchMode != RK_GET_LDCH_BY_FILE && SetLdchMode != RK_GET_LDCH_BY_BUFF) {
printf("this Ldch mode:%d, if want to set ldch, 1: read file set ldch, 2: read "
"buff set ldch
",
SetLdchMode);
return -1;
}
if (rk_aiq_uapi2_camgroup_getCamInfos(g_aiq_camgroup_ctx[CamGrpId], &camInfos) ==
XCAM_RETURN_NO_ERROR) {
for (int i = 0; i < camInfos.valid_sns_num; i++) {
aiq_ctx = rk_aiq_uapi2_camgroup_getAiqCtxBySnsNm(g_aiq_camgroup_ctx[CamGrpId],
camInfos.sns_ent_nm[i]);
if (!aiq_ctx) {
printf("rk_aiq_uapi2_camgroup_getAiqCtxBySnsNm return aiq_ctx is Null
");
return -1;
}
printf("aiq_ctx sns name: %s, camPhyId %d
", camInfos.sns_ent_nm[i],
camInfos.sns_camPhyId[i]);
memset(&ldchAttr, 0, sizeof(rk_aiq_ldch_v21_attrib_t));
ret = rk_aiq_user_api2_aldch_v21_GetAttrib(aiq_ctx, &ldchAttr);
if (ret == XCAM_RETURN_NO_ERROR) {
if (SetLdchMode == RK_GET_LDCH_BY_BUFF) {
ldchAttr.update_lut_mode =
RK_AIQ_LDCH_UPDATE_LUT_FROM_EXTERNAL_BUFFER;
ldchAttr.en = true;
ldchAttr.lut.update_flag = true;
ldchAttr.lut.u.buffer.addr = LdchMesh[i];
ldchAttr.lut.u.buffer.size = isp_get_ldch_mesh_size(LdchMesh[i]);
} else {
char *pLastWord = NULL;
pLastWord = strrchr(LdchMesh[i], '/');
if (!pLastWord) {
printf("---- error !!! the: %s path isn't to be parsed!!!!
",
(char *)LdchMesh[i]);
return -1;
}
ldchAttr.en = true;
ldchAttr.lut.update_flag = true;
ldchAttr.update_lut_mode = RK_AIQ_LDCH_UPDATE_LUT_FROM_EXTERNAL_FILE;
memcpy(ldchAttr.lut.u.file.config_file_dir, (char *)LdchMesh[i],
(pLastWord - (char *)LdchMesh[i]) + 1);
sprintf(ldchAttr.lut.u.file.mesh_file_name, "%s", (pLastWord + 1));
printf("lut file_dir: %s, mesh_file: %s
",
ldchAttr.lut.u.file.config_file_dir,
ldchAttr.lut.u.file.mesh_file_name);
}
ret = rk_aiq_user_api2_aldch_v21_SetAttrib(aiq_ctx, &ldchAttr);
if (ret != XCAM_RETURN_NO_ERROR) {
printf("Failed to set ldch attrib : %d
", ret);
return ret;
}
}
}
}
return ret;
}
RK_S32 SIMPLE_COMM_ISP_CamGroup_Init(RK_S32 CamGroupId, rk_aiq_working_mode_t WDRMode,
bool MultiCam, int OpenLdch, void *LdchMesh[],
rk_aiq_camgroup_instance_cfg_t *pCamGroupCfg) {
int i, ret;
char sensor_name_array[MAX_AIQ_CTX][128];
rk_aiq_static_info_t aiq_static_info;
if (CamGroupId >= MAX_AIQ_CTX) {
printf("%s : CamId is over %d
", __FUNCTION__, MAX_AIQ_CTX);
return -1;
}
for (i = 0; i < pCamGroupCfg->sns_num; i++) {
ret = rk_aiq_uapi2_sysctl_enumStaticMetasByPhyId(i, &aiq_static_info);
if (ret != 0) {
printf("rk_aiq_uapi2_sysctl_enumStaticMetasByPhyId failure
");
return -1;
}
printf("CamGroupId:%d, cam_id: %d, sensor_name is %s, iqfiles is %s
",
CamGroupId, i, aiq_static_info.sensor_info.sensor_name,
pCamGroupCfg->config_file_dir);
memcpy(sensor_name_array[i], aiq_static_info.sensor_info.sensor_name,
strlen(aiq_static_info.sensor_info.sensor_name) + 1);
pCamGroupCfg->sns_ent_nm_array[i] = sensor_name_array[i];
printf("pCamGroupCfg->sns_ent_nm_array[%d] is %s
", i,
pCamGroupCfg->sns_ent_nm_array[i]);
ret = rk_aiq_uapi2_sysctl_preInit_devBufCnt(
aiq_static_info.sensor_info.sensor_name, "rkraw_rx", 2);
if (ret != 0) {
printf("rk_aiq_uapi2_sysctl_preInit_devBufCnt failure
");
return -1;
}
}
g_aiq_camgroup_ctx[CamGroupId] = rk_aiq_uapi2_camgroup_create(pCamGroupCfg);
if (!g_aiq_camgroup_ctx[CamGroupId]) {
printf("create camgroup ctx error!
");
return -1;
}
/* set LDCH must before <camgroup prepare>*/
if (OpenLdch) {
SIMPLE_COMM_ISP_CamGroup_setMeshToLdch(CamGroupId, OpenLdch, LdchMesh);
}
ret = rk_aiq_uapi2_camgroup_prepare(g_aiq_camgroup_ctx[CamGroupId], WDRMode);
ret |= rk_aiq_uapi2_camgroup_start(g_aiq_camgroup_ctx[CamGroupId]);
if (ret != 0) {
printf("rk_aiq_uapi2_camgroup_prepare / start failure
");
return -1;
}
printf("rk_aiq_uapi2_camgroup_start over
");
return ret;
}
RK_S32 SIMPLE_COMM_ISP_CamGroup_Stop(RK_S32 CamGroupId) {
if (CamGroupId >= MAX_AIQ_CTX || !g_aiq_camgroup_ctx[CamGroupId]) {
printf("%s : CamId is over 3 or not init
", __FUNCTION__);
return -1;
}
printf("rk_aiq_uapi2_camgroup_stop enter
");
rk_aiq_uapi2_camgroup_stop(g_aiq_camgroup_ctx[CamGroupId]);
printf("rk_aiq_uapi2_camgroup_destroy enter
");
rk_aiq_uapi2_camgroup_destroy(g_aiq_camgroup_ctx[CamGroupId]);
printf("rk_aiq_uapi2_camgroup_destroy exit
");
g_aiq_camgroup_ctx[CamGroupId] = NULL;
return 0;
}
static RK_CHAR optstr[] = "?::a::w:h:c:I:o:m:d:";
static void print_usage(const RK_CHAR *name) {
printf("usage example:
");
printf(" %s -I 0 -w 1920 -h 1080 -o 1
", name);
printf(" -a | --aiq: iq file path, Default:/etc/iqfiles
");
printf(" -w | --width: VI width, Default:1920
");
printf(" -h | --heght: VI height, Default:1080
");
printf(" -c | --frame_cnt: frame number of output, Default:-1
");
printf(" -I | --camid: camera ctx id, Default 0. "
"0:rkisp_mainpath,1:rkisp_selfpath,2:rkisp_bypasspath
");
printf(" -d | --hdr_mode: Default:0, 0:normal,1:hdr2
");
printf(" -m | --multiple sensor: Default:0
");
printf(" -o: output path, Default:0 0 or 1 /data/test_0.yuv
");
}
int main(int argc, char *argv[]) {
RK_S32 s32Ret = RK_FAILURE;
RK_U32 u32Width = 1920;
RK_U32 u32Height = 1080;
int savefile = 0;
RK_S32 s32chnlId = 0;
int c;
char *iq_dir = NULL;
RK_S32 s32CamNum = 2;
VI_SAVE_FILE_INFO_S stDebugFile;
#ifdef RKAIQ_GRP
int hdr = 0;
int multi_sensor = RK_FALSE;
#endif
while ((c = getopt(argc, argv, optstr)) != -1) {
switch (c) {
case 'a':
if (optarg)
iq_dir = optarg;
else
iq_dir = "/etc/iqfiles";
break;
case 'w':
u32Width = atoi(optarg);
break;
case 'h':
u32Height = atoi(optarg);
break;
case 'I':
s32chnlId = atoi(optarg);
break;
case 'c':
g_s32FrameCnt = atoi(optarg);
break;
case 'o':
savefile = atoi(optarg);
break;
#ifdef RKAIQ_GRP
case 'd':
hdr = atoi(optarg);
break;
case 'm':
multi_sensor = atoi(optarg);
break;
#endif
case '?':
default:
print_usage(argv[0]);
return 0;
}
}
if (iq_dir) {
#ifdef RKAIQ_GRP
printf("#####Aiq xml dirpath: %s
", iq_dir);
rk_aiq_working_mode_t hdr_mode = RK_AIQ_WORKING_MODE_NORMAL;
if (hdr == 1)
hdr_mode = RK_AIQ_WORKING_MODE_ISP_HDR2;
rk_aiq_camgroup_instance_cfg_t camgroup_cfg;
memset(&camgroup_cfg, 0, sizeof(camgroup_cfg));
camgroup_cfg.sns_num = s32CamNum;
camgroup_cfg.config_file_dir = iq_dir;
s32Ret = SIMPLE_COMM_ISP_CamGroup_Init(0, hdr_mode, multi_sensor, 0,
RK_NULL, &camgroup_cfg);
if (s32Ret != RK_SUCCESS) {
RK_LOGE("SIMPLE_COMM_ISP_CamGroup_Init failure:%#X", s32Ret);
return RK_FAILURE;
}
#endif
}
printf("#Resolution: %dx%d
", u32Width, u32Height);
printf("#Output Path: %d
", savefile);
printf("#CameraIdx: %d
", s32chnlId);
printf("#Frame Count to save: %d
", g_s32FrameCnt);
signal(SIGINT, sigterm_handler);
if (RK_MPI_SYS_Init() != RK_SUCCESS) {
RK_LOGE("rk mpi sys init fail!");
goto __FAILED;
}
vi_dev_init0();
vi_chn_init0(s32chnlId, u32Width, u32Height);
vi_dev_init1();
vi_chn_init1(s32chnlId, u32Width, u32Height);
stDebugFile.bCfg = (RK_BOOL)savefile;
// memcpy(stDebugFile.aFilePath, "/userdata/", strlen("/data"));
strcpy(stDebugFile.aFilePath, "/userdata/");
snprintf(stDebugFile.aFileName, sizeof(stDebugFile.aFileName), "test0_%d.yuv",
s32chnlId);
RK_MPI_VI_ChnSaveFile(0, s32chnlId, &stDebugFile);
snprintf(stDebugFile.aFileName, sizeof(stDebugFile.aFileName), "test1_%d.yuv",
s32chnlId);
RK_MPI_VI_ChnSaveFile(1, s32chnlId, &stDebugFile);
RK_MPI_VI_StartPipe(0);
RK_MPI_VI_StartPipe(1);
pthread_t main_thread, sub_thread;
pthread_create(&main_thread, NULL, GetMediaBuffer0, &s32chnlId);
pthread_create(&sub_thread, NULL, GetMediaBuffer1, &s32chnlId);
while (!quit) {
usleep(50000);
}
pthread_join(main_thread, NULL);
pthread_join(sub_thread, NULL);
s32Ret = RK_MPI_VI_DisableChn(0, s32chnlId);
s32Ret = RK_MPI_VI_DisableChn(1, s32chnlId);
RK_LOGE("RK_MPI_VI_DisableChn %x", s32Ret);
s32Ret = RK_MPI_VI_DisableDev(0);
s32Ret = RK_MPI_VI_DisableDev(1);
RK_LOGE("RK_MPI_VI_DisableDev %x", s32Ret);
#ifdef RKAIQ_GRP
SIMPLE_COMM_ISP_CamGroup_Stop(0);
#endif
__FAILED:
RK_LOGE("test running exit:%d", s32Ret);
RK_MPI_SYS_Exit();
return 0;
}
#endif© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...