摘要
在直流无刷电机(BLDC)的磁场定向控制(FOC)策略中,d-q轴电流的波动会直接影响电机的转矩平稳性和控制性能。本文从理论基础、波动成因、优化方法等多个维度,深入分析了d-q轴电流波动问题,并提出了一套完整的解决方案,包括改进的采样策略、滤波器设计、控制器优化和延时补偿等技术。
1. 引言
磁场定向控制(FOC)作为BLDC电机的高性能控制策略,通过将三相电流转换到旋转的d-q坐标系实现解耦控制。然而在实际应用中,d-q轴电流的波动问题普遍存在,导致转矩脉动、效率降低和噪音增加。这种波动主要来源于电流采样噪声、参数失配、延时效应和逆变器非线性等因素。
2. FOC基本原理与电流环结构
2.1 坐标变换理论
FOC控制的核心是通过Park和Clarke变换将三相静止坐标系转换为两相旋转坐标系:
Clark变换:

Park变换:
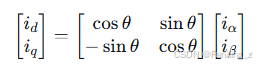
其中$ heta$为转子电角度。
2.2 电流环控制结构
d-q轴电流环通常采用PI控制器:
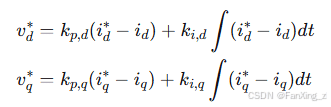
其中 ,
,  为d-q轴电压指令值,
为d-q轴电压指令值, , i_q为电流指令值。
, i_q为电流指令值。
3. d-q轴电流波动成因分析
3.1 采样与量化误差
电流采样过程中的噪声和ADC量化误差会直接引入到反馈电流中。采样噪声主要来源于:
传感器自身噪声
电磁干扰
ADC量化误差: ,其中
,其中 为ADC分辨率
为ADC分辨率
3.2 参数敏感性与失配
电机参数变化对电流环性能影响显著。d-q轴电压方程:
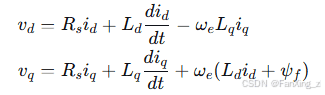
其中 为定子电阻,
为定子电阻, 为d-q轴电感,
为d-q轴电感, 为永磁体磁链,
为永磁体磁链, 为电角速度。
为电角速度。
当实际参数与控制器中使用的参数不匹配时,会产生耦合项和稳态误差,导致电流波动。
3.3 逆变器非线性效应
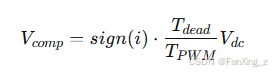
逆变器的死区时间、开关管压降和导通损耗等非线性因素会导致输出电压畸变:
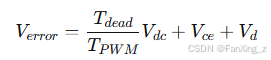
其中 为死区时间,
为死区时间, 为PWM周期,
为PWM周期, 为直流母线电压,
为直流母线电压, 和
和 分别为IGBT/MOSFET的饱和压降和二极管正向压降。
分别为IGBT/MOSFET的饱和压降和二极管正向压降。
3.4 延时效应
数字控制系统的计算延时和PWM更新延时会导致相位滞后,影响电流环稳定性。总延时通常为1.5个PWM周期:
对应的相位滞后为:
4. 降低电流波动的优化策略
4.1 改进电流采样策略
4.1.1 多采样点平均法
在单个PWM周期内进行多次采样并取平均值:
这种方法可有效抑制高频噪声,但需要注意采样时刻的选择,避免开关噪声干扰。
4.1.2 同步采样技术
在PWM中心点或峰值点进行同步采样,此时电流纹波最小,可获得最准确的电流值。
4.2 先进滤波器设计
4.2.1 移动平均滤波器
移动平均滤波器(MAF)具有理想的低通特性:
其中$N$为窗口长度。MAF在 ,(
,( )处具有陷波特性,可有效滤除特定频率干扰。
)处具有陷波特性,可有效滤除特定频率干扰。
4.2.2 自适应滤波器
基于LMS算法的自适应滤波器可跟踪噪声特性变化:
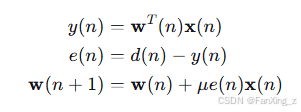
其中$mathbf{w}(n)$为滤波器权向量,$mu$为收敛因子。
4.3 电流环控制器优化
4.3.1 基于内模控制的PI参数整定
将PI控制器重构为内模控制形式:
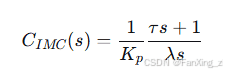
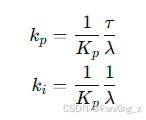
其中 为过程增益,
为过程增益, 为时间常数,
为时间常数, 为调节参数。对应的PI参数为:
为调节参数。对应的PI参数为:
4.3.2 复矢量PI控制器
考虑d-q轴耦合效应,采用复矢量PI控制器:
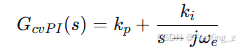
该控制器可在同步旋转坐标系中实现对交流信号的无静差跟踪。
4.4 参数辨识与自适应补偿
4.4.1 在线参数辨识
采用递推最小二乘法(RLS)进行在线参数辨识:
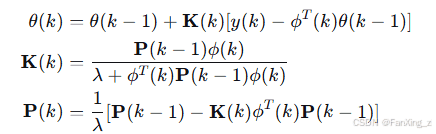
其中 为待辨识参数向量,
为待辨识参数向量, 为数据向量,为遗忘因子。
为数据向量,为遗忘因子。
4.4.2 前馈解耦补偿
在前馈路径中加入解耦项和反电动势补偿:

4.5 延时补偿策略
4.5.1 状态观测器预测
采用龙贝格观测器或卡尔曼滤波器预测下一时刻的电流值:

使用预测值进行电流控制,可有效补偿系统延时。
4.5.2 史密斯预估器
在电流环中引入史密斯预估器补偿计算延时:

其中$G_p(s)$为被控对象模型,$T_d$为延时时间。
4.6 逆变器非线性补偿
4.6.1 死区时间补偿
根据电流极性注入补偿电压:
4.6.2 基于查找表的非线性补偿
通过实验测量建立电压误差查找表,实时补偿逆变器非线性:
5. 实验验证与结果分析
为验证所提方法的有效性,搭建了基于DSP的BLDC电机FOC实验平台。实验电机参数:额定功率500W,极对数4,定子电阻0.2Ω,d-q轴电感1.5mH。
5.1 波动抑制效果对比
采用传统PI控制时,d-q轴电流波动幅度为±0.5A;采用本文提出的综合优化方案后,波动幅度降低至±0.1A,波动抑制效果显著。
5.2 动态性能测试
在负载突变工况下,优化后的电流环恢复时间从15ms缩短至5ms,且超调量减少60%,表现出优良的动态性能。
6. 结论
本文系统分析了BLDC电机FOC控制中d-q轴电流波动的成因,并提出了一套完整的波动抑制方案。通过改进采样策略、优化滤波器设计、采用先进控制算法和补偿非线性因素,可显著降低电流波动,提高系统性能。实验结果表明,所提方法能有效抑制电流波动,改善转矩平稳性,为高性能BLDC电机控制提供了实用解决方案。
参考文献
[1] B. K. Bose, “Modern Power Electronics and AC Drives,” Prentice Hall, 2002.
[2] J. Holtz, “Advanced PWM and Predictive Control—An Overview,” IEEE Transactions on Industrial Electronics, 2016.
[3] 王高林, 等. “永磁同步电机无位置传感器控制技术综述,” 电工技术学报, 2018.
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...