,使得矩阵
,使得矩阵 的特征值为设计的特征值
的特征值为设计的特征值
一、状态观测器的意义
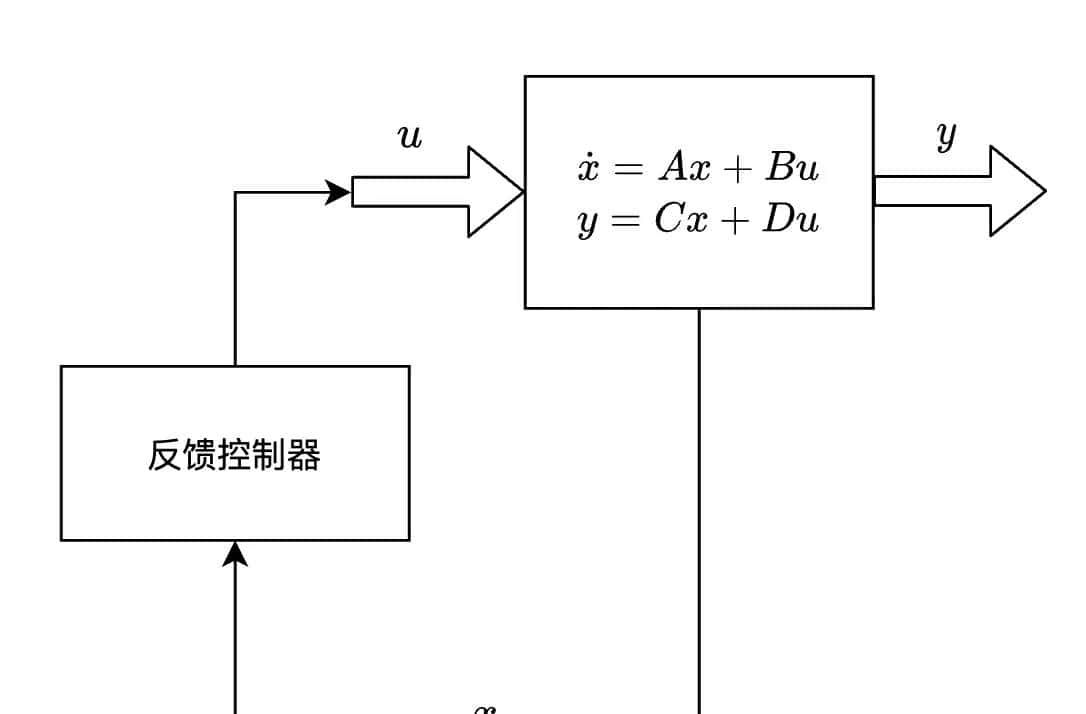
状态反馈相对于输出反馈的控制效果更好,因此对于一个只有输入量和输出量的系统,需要模拟系统得到其状态量才能进行状态反馈。

可以证明这种状态反馈和直接进行的状态反馈是等价的,因此对于变量难以观测的系统,常常使用状态观测器作为反馈变量的产生器。
二、全维状态观测器
全维状态观测器对于每一个状态变量进行估计。
1.定义
系统的状态完全能观
系统输入 输出
输出 可以直接测量
可以直接测量
系统的观测状态收敛于系统状态
2.形式
系统的全维状态观测器的形式为

推导观测器误差方程为

通过这个误差方程配置全维状态观测器的极点。而全维状态观测器的极点可以任意配置的充分必要条件是原系统的状态完全能观,因此定义中需要系统的能观性。
3.设计步骤
- 根据需求设计观测器的特征值
- 确定观测器的状态增益矩阵
 ,使得矩阵的特征值为设计的特征值
,使得矩阵的特征值为设计的特征值 - 构造全维状态观测器
- 进行数字仿真
4.全维状态观测器的模拟结构图

5.系统的维数分析
原系统为 维,状态观测器为维
维,状态观测器为维
一共是 维
维
三、降维状态观测器
降维状态观测器的原理是,由于系统的输出可以直接输出部分变量的信息,因此可以状态观测器的维度可以降低,以达到节约系统维数的目的。
1.定义
由系统输出可以直接得到若干状态变量时,可以降低系统状态观测器的维数。维数的减少量等于输出能够推导得到的状态变量的个数。
2.形式
降维状态观测器的动态方程

降维状态观测器的输出方程

3.设计步骤
构造坐标变换矩阵 ,其前p行为C,后n-p行为任意构造的G,最终使得P为非奇异矩阵
,其前p行为C,后n-p行为任意构造的G,最终使得P为非奇异矩阵

得到常用矩阵Q的表达式

使用变换将原系统化为

只需要观测子向量 ,构造其全维状态观测器即可。
,构造其全维状态观测器即可。
将上系统写作另外一种形式

因此可以定义新的输入和输出量
输入
输出
则系统可以写成标准形式的状态空间表达式

构造 维的状态观测器
维的状态观测器

公式中含有 ,不利于设计和使用,因此需要继续进行形式上的变换,令
,不利于设计和使用,因此需要继续进行形式上的变换,令
即得到上述降维状态观测器动态方程的形式:
而反过来, 则系统的完整状态重构方程可以写成
则系统的完整状态重构方程可以写成

最后转换回原系统的状态空间:
 即为降维状态观测器的输出方程
即为降维状态观测器的输出方程
4.降维状态观测器的模拟结构图**
模拟结构图过于复杂,因此不做展示
5.系统的维数分析
原系统为维,状态观测器为维
则构造出的系统为 维
维
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...