

Modbus TCP
ModbusTCP通信协议是基于TCP报文数据传输的协议,ROBOGUIDE中仅支持服务模式下交换I/O数据,设置Modbus TCP通信方式如下。
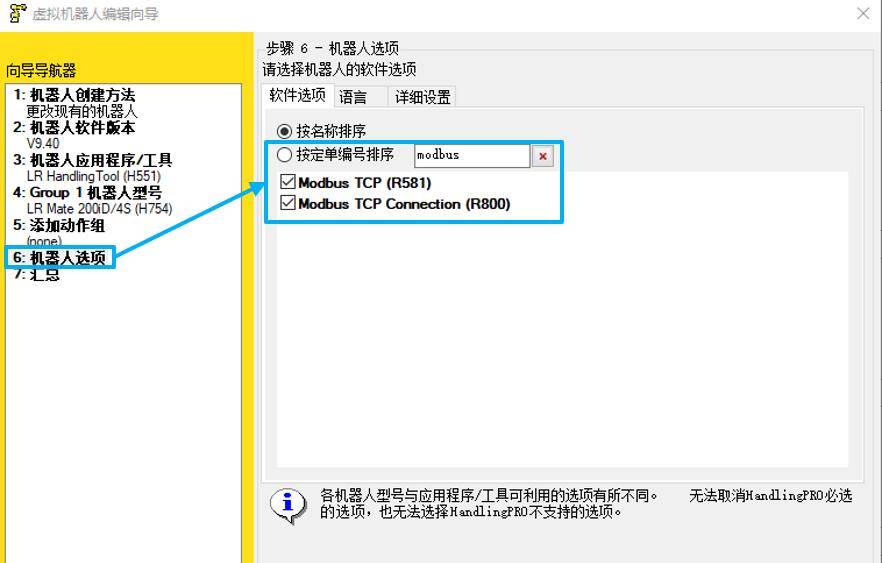
Step1. 添加软件选项
ROBOGUIDE中实现Modbus通信时需添加“ModbusTCP(R581)”和“ModbusTCP Connection(R800)”软件选项。
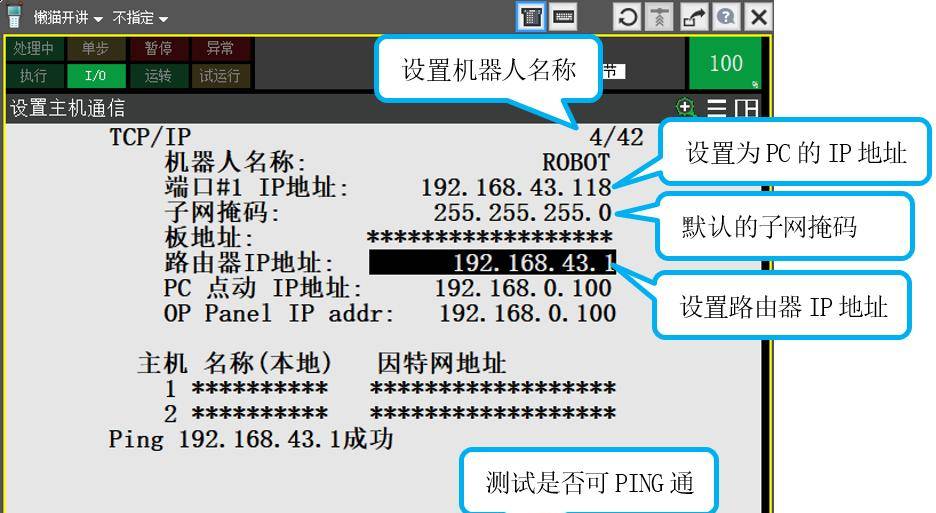
Step2. 设置机器人IP地址
设置“端口#1 IP地址”为当前运行ROBOGUIDEPC的IP地址。
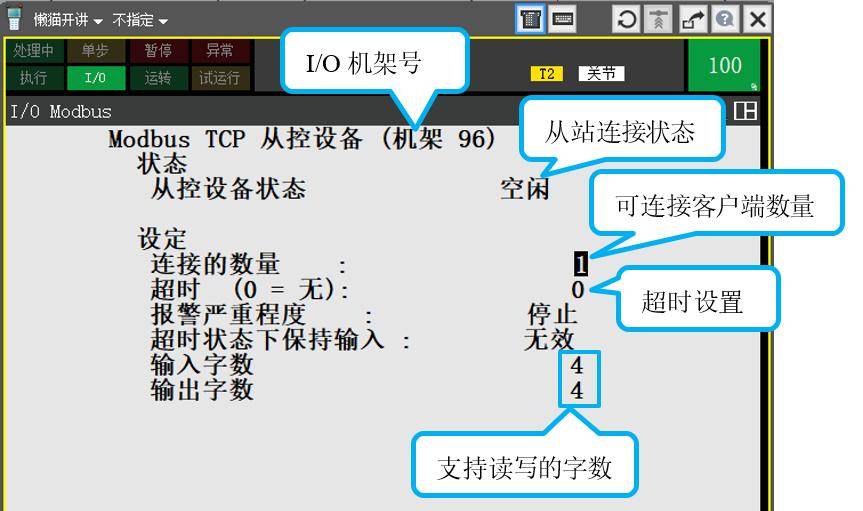
Step3. 配置ModbusTCP
单击示教器“MENU”键后选择“5 I/O”中“Modbus TCP”进入“I/O Modbus”配置页面,安装下图设置。
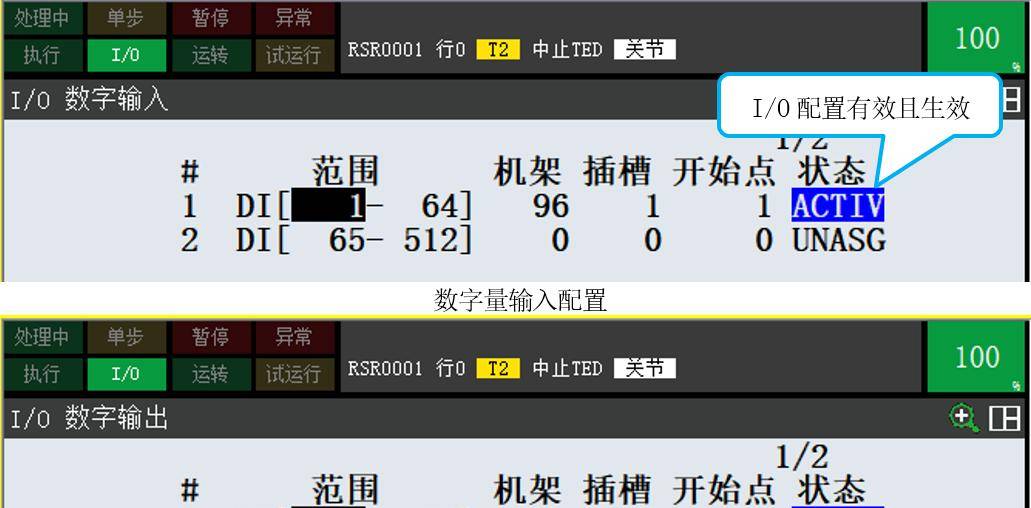
Step4.分配I/O
以Modbus TCP方式分配给工业机器人的数字量I/O只可设置机架号为96,槽位号为1。配置参考如下图所示。
Step5.通信测试
以Modbus Poll软件为例测试数据通信。
1.读取DO状态
在TP中修改数字量输出状态,Modebus Poll软件中对应的位置发生变化,证明通信成功。

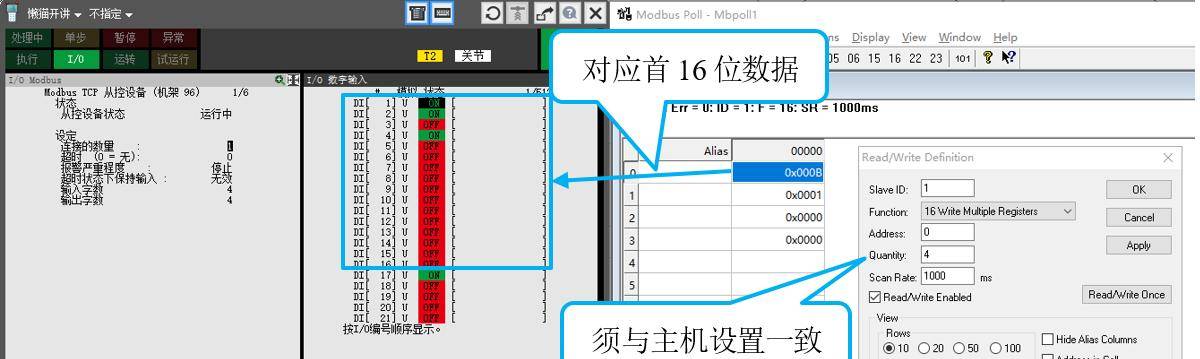
2.写入DI数据
以“字”为单位写入数据,因ROBOGUIDE中设置读写字为4个,所以数量须设置为4个,否则系统报地址错误,设置及通信状态如下图所示。
ROBOGUIDE设置注意事项
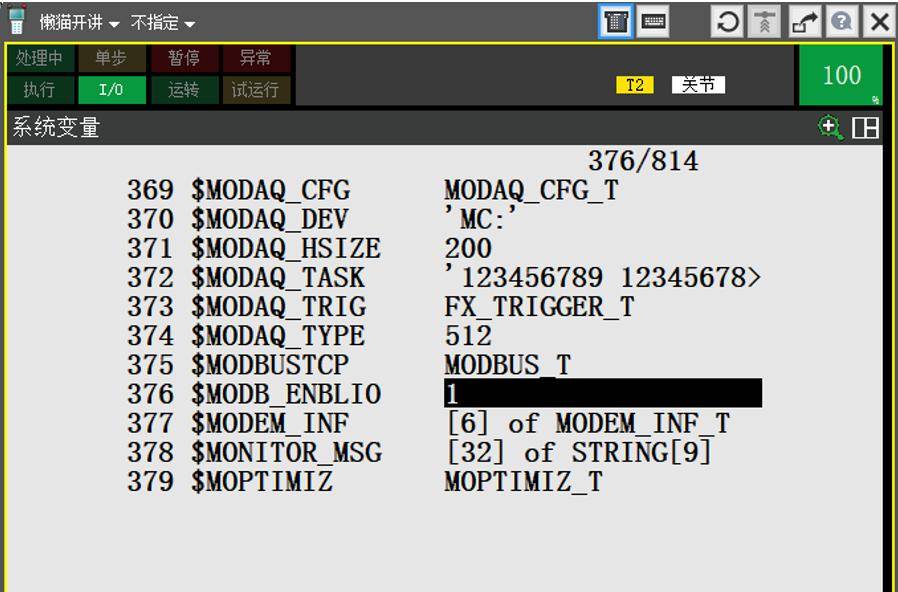
若上述设置后通信未成功,请检查通信超时是否正确,主机超时时长略大于从机读写周期时间,同时注意将系统变量”$MODB_ENBLIO”设置为1。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


您必须登录才能参与评论!
立即登录








modbus tcp好像是标配吧
还真不是
这个是要刷机还是要买软件包?
仿真中自己添加即可
怎么刷系统
发那科要刷系统开通功能吧?就像CC-Link一样
yes,只是CCLink还需要硬件