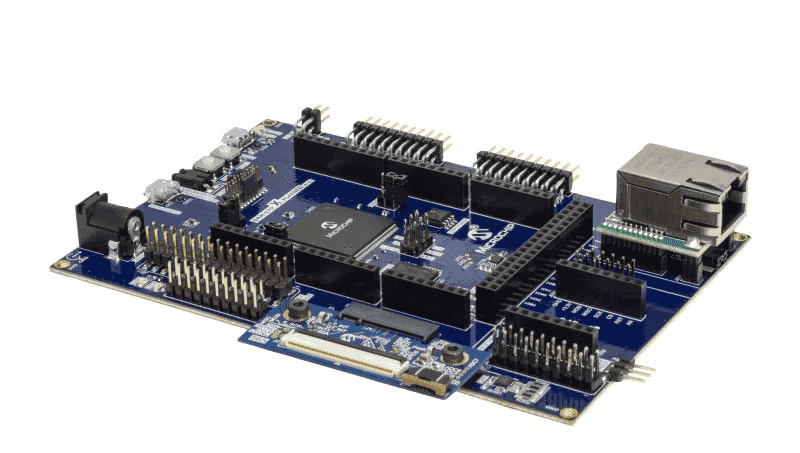
由于项目需要开始接触Microchip(原Atmel)家的这款MCU,使用工具是SAM E70 X PLAINED ULTRA开发板。本系列用于记录从0开始一步步熟悉这款MCU的开发过程。开发板外设资源丰富,之前一直是使用HAL库开发ST/GD系列的MCU,Microchip的开发风格与前两者存在一定差异,借此机会巩固一下基础知识。
开发板用户手册
ATSAME70Q21B Microcontroller
Cortex-M7 Core-based MicrocontrollerMax Speed: 300MHzFlash: 2048KB
移植FreeRTOS
SAME70移植FreeRTOS要比STM32要更加简单,主要的工作内容在导入源文件和添加头文件。
移植目录结构
下载FreeRTOS源码(可以下载官方移植好的工程模版作为参考),分别导入
Source Files
Header Files
导入源码后工程层级如下:
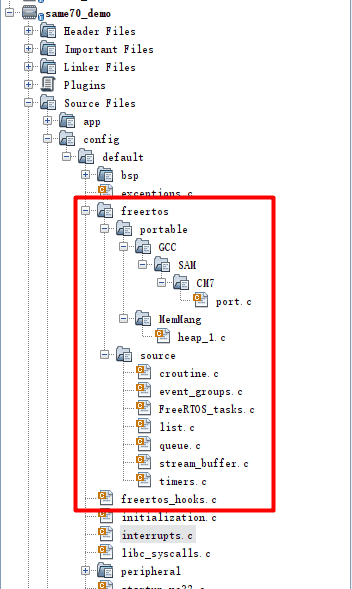
portable
FreeRTOS有三个关键的中断函数:
SVC、PendSV、Systick
port.c
interrupts.c
.pfnSVCall_Handler = vPortSVCHandler,
.pfnPendSV_Handler = xPortPendSVHandler,
.pfnSysTick_Handler = xPortSysTickHandler,
至此已经完成80%的移植工作。除FreeRTOS源码,还需要添加
freertos_hooks.c
创建任务
创建两个LED任务,一个闪烁间隔500ms,一个闪烁间隔1s。
TaskHandle_t led1_task_handle, led2_task_handle;
static void led1_task_entry(void *pvParameters)
{
while (true) {
LED1_Toggle();
vTaskDelay(500);
}
}
static void led2_task_entry(void *pvParameters)
{
while (true) {
LED2_Toggle();
vTaskDelay(1000);
}
}
void SYS_Tasks ( void )
{
(void) xTaskCreate((TaskFunction_t) led1_task_entry, "led1_task", 256, NULL, 1U, &led1_task_handle);
(void) xTaskCreate((TaskFunction_t) led2_task_entry, "led2_task", 256, NULL, 1U, &led2_task_handle);
/* Start RTOS Scheduler. */
/**********************************************************************
* Create all Threads for APP Tasks before starting FreeRTOS Scheduler *
***********************************************************************/
vTaskStartScheduler(); /* This function never returns. */
}
编译运行,LED1和LED2分别按照不同频率开始闪烁。至此FreeRTOS移植完成。
移植RT-Thread Nano
相比于FreeRTOS,RT-Thread的移植稍微复杂一些。移植原理可以参考官方文章,非常详细:RT-Thread移植
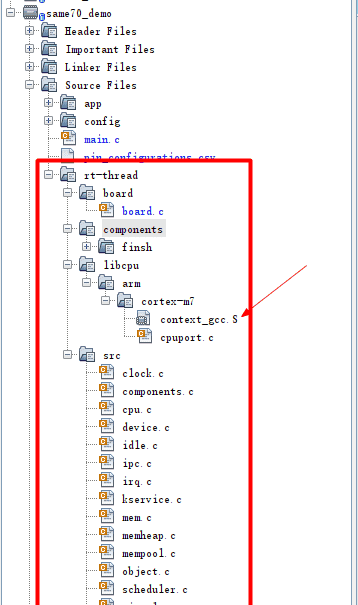
首先还是一样,添加源文件和头文件路径。这里要注意,由于Microchip默认的工程使用的都是C文件(包括启动文件),所以没有添加汇编文件路径,而RT-Thread需要添加
context_gcc.S

移植目录结构
添加后的工程如下:
libcpu移植
RT-Thread 的 libcpu 抽象层向下提供了一套统一的 CPU 架构移植接口,这部分接口包含了全局中断开关函数、线程上下文切换函数、时钟节拍的配置和中断函数、Cache 等等内容,RT-Thread 支持的 cpu 架构在源码的 libcpu 文件夹下。
这里放一张RT-Thread官方的启动流程图,方便我们理解启动顺序。
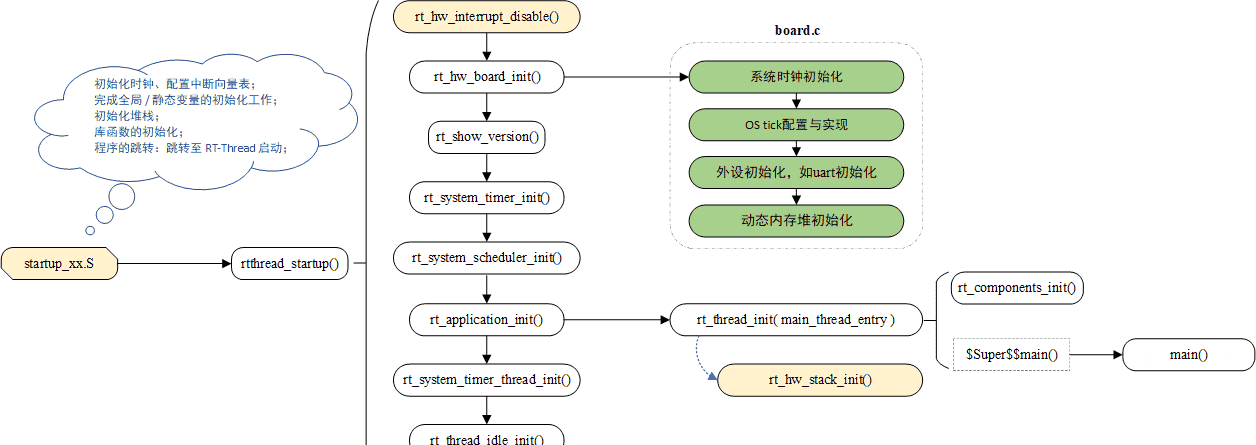
RT-Thread会在进入
main
main
修改前:
extern int main(void);
/**
* rief This is the code that gets called on processor reset.
* To initialize the device, and call the main() routine.
*/
void __attribute__((optimize("-O1"), section(".text.Reset_Handler"), long_call, noreturn)) Reset_Handler(void)
{
...
/* Branch to application's main function */
(void)main();
...
}
修改后:
extern int main(void);
extern int entry(void);
/**
* rief This is the code that gets called on processor reset.
* To initialize the device, and call the main() routine.
*/
void __attribute__((optimize("-O1"), section(".text.Reset_Handler"), long_call, noreturn)) Reset_Handler(void)
{
...
/* Branch to application's main function */
// (void)main();
(void)entry();
...
}
在
components.c
entry
/* Add -eentry to arm-none-eabi-gcc argument */
int entry(void)
{
rtthread_startup();
return 0;
}
上下文切换
接下来,像移植FreeRTOS一样,修改三个重要的中断函数,这里比较巧的是,RT-Thread的
SVCall_Handler
PendSV_Handler
SysTick_Handler
板级移植
主要是针对
rt_hw_board_init
/**
* This function will initial SAME70 board.
*/
void rt_hw_board_init(void)
{
/* Initializes MCU, drivers and middleware */
EFC_Initialize();
CLOCK_Initialize();
PIO_Initialize();
/* Disable the watchdog */
WDT_REGS->WDT_MR = WDT_MR_WDDIS_Msk;
SCB_EnableICache();
/* enable USART stdout module */
hw_board_init_usart();
/* UART driver initialization is open by default */
#ifdef RT_USING_SERIAL
rt_hw_uart_init();
#endif
/* init systick */
SYSTICK_TimerInitialize();
/* set pend exception priority */
NVIC_Initialize();
NVIC_SetPriority(PendSV_IRQn, (1 << __NVIC_PRIO_BITS) - 1);
#ifdef RT_USING_HEAP
#if defined(__ARMCC_VERSION)
rt_system_heap_init((void*)&Image$$RW_IRAM1$$ZI$$Limit, (void*)HEAP_END);
#elif __ICCARM__
rt_system_heap_init((void*)HEAP_BEGIN, (void*)HEAP_END);
#else
/* init memory system */
rt_system_heap_init((void*)HEAP_BEGIN, (void*)HEAP_END);
#endif
#endif
/* Set the shell console output device */
#if defined(RT_USING_CONSOLE) && defined(RT_USING_DEVICE)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
}
实现动态内存堆
上面我们可以看到一行关键代码:
/* init memory system */
rt_system_heap_init((void*)HEAP_BEGIN, (void*)HEAP_END);
上面使用到的两个宏定义如下:
#define SAME70_SRAM_SIZE 384
#define SAME70_SRAM_END (0x20400000 + SAME70_SRAM_SIZE * 1024)
extern char __bss_end[];
#define HEAP_BEGIN (__bss_end + 0x1000)//官方教程为__bss_end
#define HEAP_END SAME70_SRAM_END
在移植过程中在这里踩了点坑,后来也没有搞明白原因。调用
rt_system_heap_init
一开始按照RT-Thread的BSP示例中添加的堆起始地址为
__bss_end
. = ALIGN(4);
_end = . ;
__bss_end = _end;
_ram_end_ = ORIGIN(ram) + LENGTH(ram) -1 ;
但是实际跑起来一直是申请失败,后来尝试把该变量打印出来,发现
__bss_end
至此内核移植工作完成。
适配串口
void rt_hw_console_output(const char *str)
{
while (*str)
{
if (*str == '
')
{
while (!(USART1_REGS->US_CSR & US_CSR_USART_TXRDY_Msk));
USART1_REGS->US_THR = '
';
}
/* Wait for Empty Tx Buffer */
while (!(USART1_REGS->US_CSR & US_CSR_USART_TXRDY_Msk));
/* Transmit Character */
USART1_REGS->US_THR = *str;
str ++;
}
}
RTM_EXPORT(rt_hw_console_output);
static inline void hw_board_init_usart(void)
{
USART1_Initialize();
}
启动测试:
| /
- RT - Thread Operating System
/ | 4.1.1 build Nov 11 2025 20:14:19
2006 - 2022 Copyright by RT-Thread team
创建任务
创建两个LED任务,一个闪烁间隔500ms,一个闪烁间隔1s。
rt_thread_t led1_tid, led2_tid;
static void led1_task_entry(void *pvParameters)
{
while (true) {
LED1_Toggle();
rt_thread_mdelay(500);
}
}
static void led2_task_entry(void *pvParameters)
{
while (true) {
LED2_Toggle();
rt_thread_mdelay(1000);
}
}
void SYS_Tasks ( void )
{
led1_tid = rt_thread_create("led1_task", led1_task_entry, RT_NULL, 256, 5U, 100);
rt_thread_startup(led1_tid);
led2_tid = rt_thread_create("led2_task", led2_task_entry, RT_NULL, 256, 5U, 100);
rt_thread_startup(led2_tid);
}
启动测试,两个LED开始按设定频率闪烁。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...