1. 引言
直流无刷电机(BLDC)因其高功率密度、高效率等优点,在工业控制领域获得了广泛应用。其控制性能很大程度上取决于转速环的控制效果。本文将基于BLDC的dq模型,深入探讨采用对称最优法设计转速环PI参数的原理与实现方法。
我们将从BLDC的数学模型出发,分析转速环的控制结构,重点阐述对称最优法的理论基础、设计步骤和参数整定方法,并针对采样频率25kHz、电流环简化为一阶惯性环节的实际条件,提供详细的设计实例。
2. BLDC的dq模型与转速环结构
2.1 dq坐标系下的BLDC数学模型
在dq同步旋转坐标系下,BLDC的电压方程可表示为:
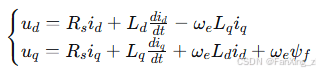
其中, 、
、 为d、q轴电压,
为d、q轴电压, 、
、 为d、q轴电流,
为d、q轴电流, 、
、 为d、q轴电感,
为d、q轴电感, 为定子电阻,
为定子电阻, 为永磁体磁链,
为永磁体磁链, 为电角速度。
为电角速度。
电磁转矩方程为:

对于面装式永磁同步电机(SPMSM), ,转矩方程简化为:
,转矩方程简化为:
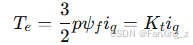
其中, 为转矩常数,
为转矩常数, 为极对数。
为极对数。
2.2 转速环控制结构
转速环通常作为外环,其输出作为q轴电流的给定值 ,控制框图如下:
,控制框图如下:
转速给定ω* → 转速控制器 → iq* → 电流环 → 电机 → 实际转速ω
↑ |
+------------------------+
转速控制器的设计目标是使实际转速 快速、准确地跟踪给定值
快速、准确地跟踪给定值 ,同时保证系统的稳定性和鲁棒性。
,同时保证系统的稳定性和鲁棒性。
3. 对称最优法理论基础
3.1 对称最优法的基本思想
对称最优法(Symmetrical Optimum Method)是一种基于频域设计的控制器参数整定方法,特别适用于具有惯性环节的系统。其核心思想是通过合理选择控制器参数,使系统的开环频率特性在截止频率附近呈现对称特性,从而获得较好的动态性能和稳定裕度。
3.2 典型系统结构
考虑电流环简化为一阶惯性环节的情况,电流环的传递函数为:
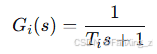
其中, 为电流环等效时间常数。
为电流环等效时间常数。
电机机械运动方程为:
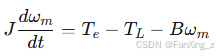
其中, 为转动惯量,
为转动惯量, 为负载转矩,
为负载转矩, 为粘滞摩擦系数。
为粘滞摩擦系数。
忽略负载转矩和摩擦,从q轴电流到机械转速的传递函数为:
因此,转速环的被控对象传递函数为:

4. 转速环PI控制器设计
4.1 PI控制器形式
转速环采用PI控制器,其传递函数为:

其中, 为比例系数,
为比例系数, 为积分时间常数。
为积分时间常数。
4.2 开环传递函数
系统开环传递函数为:

整理得:
4.3 对称最优法设计准则
对称最优法的设计准则如下:
相位裕度最大化:通过合理选择参数,使系统在截止频率 处具有最大相位裕度
处具有最大相位裕度
幅频特性对称:在附近,幅频特性曲线近似对称
参数关系:选择积分时间常数 ,其中
,其中 为设计参数
为设计参数
4.4 参数整定过程
根据对称最优法,按以下步骤整定PI参数:
步骤1:确定积分时间常数
选择,通常取 ,本文取
,本文取 :
:
步骤2:计算比例系数
根据对称最优法,开环传递函数在截止频率处的幅值应为1:
将 代入开环传递函数:
代入开环传递函数:
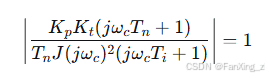
在截止频率处,有 ,
, (合理选择),近似可得:
(合理选择),近似可得:
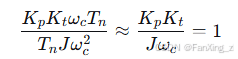
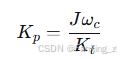
因此:
根据对称最优法理论,最佳截止频率为:
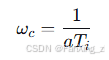
代入得:
最终得到比例系数:
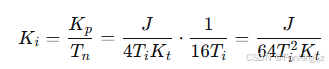
步骤3:计算积分系数
积分系数 与积分时间常数的关系为:
与积分时间常数的关系为:
5. 考虑数字实现的离散化
5.1 离散PI控制器
在数字控制系统中,需要将连续PI控制器离散化。采用双线性变换(Tustin变换),令 ,其中
,其中 为采样周期。
为采样周期。
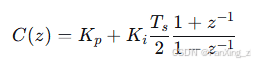
PI控制器的离散形式为:
5.2 离散化实现
给定采样频率25kHz,采样周期$T_s = 40mu s$。
位置式PI算法:

其中, 为上一次的积分项输出。
为上一次的积分项输出。
增量式PI算法:

6. 设计实例与性能分析
6.1 系统参数假设
假设系统参数如下:
转动惯量
转矩常数
电流环时间常数
设计参数
6.2 PI参数计算
根据前述公式:
6.3 性能指标分析
相位裕度:
开环传递函数在截止频率处的相位为:

代入 ,
, ,
, :
:

相位裕度,满足一般工业应用要求( )。
)。
超调量:
对称最优法设计的系统通常会有一定的超调量,约为30% 40%。如需减小超调,可采取以下措施:
40%。如需减小超调,可采取以下措施:
增加设计参数 的值
的值
加入设定值滤波器
采用变参数PI控制
7. 实际应用考虑
7.1 抗饱和处理
在实际系统中,需要考虑输出限幅和抗饱和处理。常用的抗饱和方法有:
积分分离:当误差较大时,取消积分作用
抗饱和补偿:当输出饱和时,停止积分或减小积分量
条件积分:仅在特定条件下进行积分
7.2 参数鲁棒性
对称最优法设计的控制器对系统参数变化具有一定的鲁棒性,但当$J$、$K_t$等参数变化较大时,仍需考虑:
在线参数辨识
自适应控制
鲁棒控制方法
7.3 数字实现注意事项
量化误差:注意ADC分辨率和计算字长
计算延时:考虑算法执行时间和PWM更新时机
抗混叠滤波:转速测量需加入合适的滤波
8. 总结
本文详细介绍了基于对称最优法的BLDC转速环PI控制器设计方法,主要贡献包括:
建立了BLDC的dq模型和转速环控制结构
深入阐述了对称最优法的理论基础和设计准则
推导了PI参数的解析表达式
提供了考虑数字实现的离散化方法
通过设计实例验证了方法的有效性
对称最优法作为一种系统化的控制器设计方法,在BLDC控制中具有重要应用价值。通过合理选择设计参数,可以在保证系统稳定性的同时,获得满意的动态性能。
参考文献
Krishnan, R. (2001). Electric Motor Drives: Modeling, Analysis, and Control. Prentice Hall.
Bose, B. K. (2002). Modern Power Electronics and AC Drives. Prentice Hall.
阮毅, 陈伯时. (2010). 电力拖动自动控制系统. 机械工业出版社.
*版权声明:本文为原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。*
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...